谷歌无人驾驶核心技术(技术比车企先进)
科技巨头谷歌在无人驾驶项目上起步早,并积累了一定的技术先进性,但其商业化进程却始终缓慢,究竟是什么成为它难以逾越的障碍?
在汽车自动驾驶领域,一直有两个主要的参与者——传统车企和互联网科技公司,他们从一开始就选择了不同的路线。
通常来说,传统车企都采用一种“循序渐进”的策略,即从高级驾驶辅助系统(ADAS)入手,一步步提高系统的自动化水平。
而另一头,以谷歌为代表的互联网巨头则采用了更为激进的方式,想一步到位直接开发无人驾驶技术,也就是达到Level 4 甚至Level 5等级的自动驾驶技术。
那么在技术上,谷歌和传统车企有什么不同呢?
谷歌认为,要实现真正的无人驾驶,就必须对车辆进行精准定位,为此谷歌搬出了行业内最为先进的激光雷达技术。
激光雷达的英文是Lidar,是由光(Light)和雷达(Radar)拼合起来的单词,顾名思义就是通过发射激光探测数据的雷达系统。这一技术现今在汽车行业中越来越重要,此前则广泛用于遥感测量。为了测绘地形地貌,飞机会载着它飞来飞去,下面的地形地貌3D数据就会测量出来。
Lidar的原理和普通雷达类似,只是它发出的电磁波是能量密度集中的激光(通常是不伤眼睛的不可见光)。Lidar发射一道激光后等待并收到对应的反射信号,那么Lidar到障碍物表面的距离就可通过——时间差*光速/2的计算得出。紧接着,Lidar会偏离一个很小的角度再次发射激光测量,如此反复可以在1秒内射出十几万次类似的激光束,也就是相当于在短时间内完成十几万次的测量,而且精度还相当地高,可达到厘米级别。这也是为什么谷歌采用它的原因。
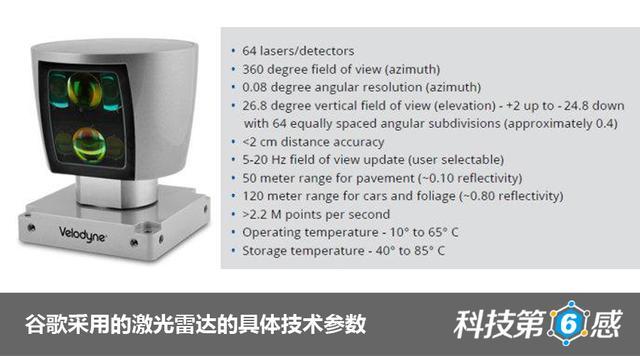
如果有兴趣同学可以仔细看一下这个Lidar的具体技术参数。
由上图可知,谷歌的激光雷达能同时发出64道的激光束,最快每秒旋转20圈,也就是每1/20秒或者50毫秒便生成一张车辆周围的3D图像;它的测量范围是120米,精度达到2厘米,每秒钟采集2.2MB的数据信息。
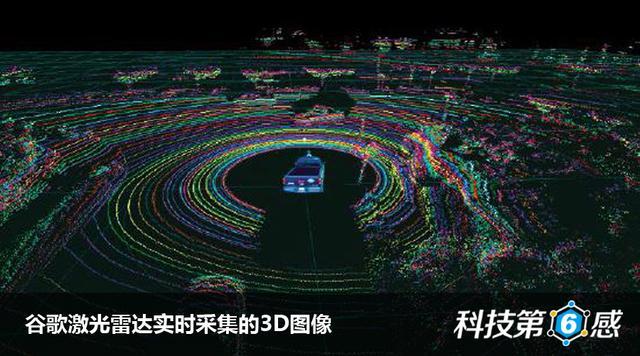
下图是一张Lidar实时采集的3D图像,汽车周围所有的障碍物以及地形的轮廓都已经被Lidar扫描出来了。
通过数据的分析和处理,可以把移动物体识别出来,车辆、行人、摩托车或者自行车手,甚至动物都可以被识别出来。例如在下面的实时3D图像中,所有车辆被用粉色轮廓标识,行人用黄色轮廓标识。
那么Lidar如何实现精准定位呢?除了实时采集的高精度3D图像,还需要有高精度地图,两者比对便能够实现精准定位,精度可以达到厘米级。
实现了对车辆的精准定位,并对车辆周围所有移动物体进行识别,测量它们的行进方向及速度,就能通过一定的算法来实现对车辆的自动驾驶了。不断完善这个算法或者控制系统是谷歌目前正在努力的方向,为此谷歌进行了大量的测试,据说目前的路试里程已经积累达到350万英里(约合563万公里)。
那么如何才算是“完善”呢?为此谷歌定义了一个名词“脱离”,英文是Disengage。当控制系统发现无法处理某个场景而需要测试人员接管控制时,会产生一次“脱离”。“脱离”意味着从自动控制脱离到人工控制。
在实际路测中,每一次“脱离”都会被编号,详细的场景信息包括周围的3D地形图、传感器输入的信号、脱离后人工控制的信息等都会被详细的记录下来,然后就交给软件工程师去处理。
软件工程师的工作就是想法设法搞定这些“脱离”,遇到类似的场景时控制系统能自己处理而不用“脱离”。“脱离”的次数越少,就说明控制系统越智能和完善。
除了激光雷达,传统车企中广泛采用的摄像头、毫米波雷达和超声波雷达等传感器谷歌也会采用,但这些传感器在谷歌系统中无疑变成了次要地位,只起到一些辅助作用。例如,摄像头主要用于识别交通信号灯,或限速交通指示牌;由于激光雷达的探测角度有限,车辆周围激光雷达探测不到的近距离范围,就成了超声波雷达负责探测的区域;毫米波雷达可能是用于冗余作用,即激光雷达失效了,可依靠毫米波雷达采集的信息把车辆停在一个安全的位置。
不得不承认,谷歌的无人驾驶技术是目前世界上最为先进的,在某些条件下确实能达到Level 4以上的自动驾驶水平。但市场化的角度来说谷歌并不能算是“先进”,因为其研发多年,商业化进程却步伐缓慢,这是为什么呢?
谷歌的自动驾驶领域存在着技术上难以逾越的障碍。
首先,激光雷达的成本太高。激光雷达性能虽好,但实在是太贵了。谷歌一套激光雷达的采购成本据说超过7万美金(约合46万人民币),这样的价格在美国都可以买一辆特斯拉的Model S了。以这样的成本,大规模的商用根本无从谈起。再说了,把这么昂贵的设备放在车身外,似乎也并不是一个好主意,窃贼们可能要蠢蠢欲动了。
其次,采集和维护一个高精度3D地图的工作不可谓不疯狂。高精度的3D地图意味着海量的数据——一般来说每公里的数据量可达1G,常规容量1T的硬盘也只能存下1000公里的道路数据,这远远满不了无人驾驶的需求,上海一个城市的公路总里程就已超过1万公里,如果把比较窄的里弄以及住宅小区的内部道路包括进去,那真是天量的数据。而且任何道路维修施工或新道路的建成都会带来地图的不断变化,如何来维护及更新这个高精度3D地图呢?很明显行业内还没有答案。
最后,在雨雪雾的天气下,激光雷达的探测性能会急剧下降,所以天气不好谷歌的无人驾驶车是无法出门的。
为保证硬件运算速度,谷歌使用了英特尔处理器。但随着控制系统的不断完善,其对硬件处理能力的要求会越来越高,硬件系统几乎成了一个超级电脑,软硬件的复杂程度相当之高,这对系统的安全性提出了巨大挑战。
要知道,在无人驾驶技术开发中安全永远是第一位的。
随着汽车领域中关于功能安全的ISO26262规范的推广,目前整车设计的安全等级普遍达到了ASIL(Automotive Safety Integration Level,汽车安全完整性等级)的C级标准。目前谷歌的无人驾驶控制系统还处于原型测试阶段,为了满足汽车行业对功能安全的要求,从原型测试阶段到量产阶段势必要经过极其大量和繁重的测试,甚至整个系统都需要经过重新设计,不经过几年时间几乎是不可能实现的。
商业化的进展缓慢,似乎也让谷歌逐渐失去耐心了,这一心态演化为谷歌在2016年底最终将其自动驾驶汽车项目分拆为一家单独的公司Waymo。
为了尽早商业化,Waymo放弃了可爱造型的实验车,转而和菲亚特克莱斯勒集团(FCA)合作,目前已经有100辆Pacifica跑在路上了。Waymo希望通过对量产车型的改造,有朝一日能开发出成熟的自动驾驶技术,从而成功向更多的整车厂售卖他们的无人驾驶系统。
看来谷歌不想烧钱了,但到目前为止,Waymo还无法提出一个令人信服的商业化项目时间表,烧钱也只能继续...与此同时,众多无人驾驶项目高管的离职,也显示出其商业化进程有多么艰难。
但也有值得鼓舞的消息。
今年9月,Waymo宣布和英特尔达成战略合作共同开发无人驾驶技术。而英特尔在今年3月刚刚以153亿美元的代价收购了足以称为自动驾驶ADAS技术先锋的以色列公司Mobileye,这意味着,通过英特尔的牵线搭桥,此前在技术路线上争得水深火热的谷歌(Waymo)和Mobileye有望实现合作。强强联手会碰撞出怎样的火花呢?技术流的谷歌会闯出一条怎样的道路呢?让我们拭目以待吧。
本月,谷歌旗下Waymo公开了一份长达43页的自动驾驶汽车技术安全评估报告。这份安全报告逐一列举了Waymo公司考虑汽车安全行驶中所用到的各种参数,如何收集汽车行驶中所用数据和功能的方法及收集时间,从而让车辆能够满足更广范围内的用户使用,比如向视觉和听觉存在障碍的用户提供盲文标签、声音和图像显示等功能。尽管调查显示,仍有约75%的美国人害怕乘坐自动驾驶汽车,但谷歌此举无疑能消除一部分人的顾虑。
不积跬步,无以至千里。
文章来源:腾讯汽车
,







免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。文章投诉邮箱:anhduc.ph@yahoo.com






