公路车道曲线识别(基于自然轨迹考虑车型的多车道公路交通指标分析)
摘 要:分析了HighD和NGSIM两个开放的自然驾驶数据集中交通流参数(如速度和流量)与安全指标(如车头空距(DHW)、车头时距(THW)和碰撞时间(TTC))的异同。首先针对两个数据集分析了交通状态、不同车道和车辆类型等参数对交通流参数的影响。然后,针对车辆跟驰情况,研究了基于不同车道和不同车型的安全指标分布,探讨了安全指标与车辆行驶速度的关系。结果表明:(1)各车道平均车速与最小DHW和THW呈显著正相关,速度分布受交通状态、不同车道和车型的影响;(2)不同车道、不同车型对DHW和THW分布有显著影响;(3)THW适合于高速场景下跟驰状态的安全评价,THW和TTC的组合可以用来对低速场景进行安全评价。
关键词:公路交通;自然驾驶数据集;车辆类型;安全指标;
基金:国家重点研发计划资助,项目编号2019YFB1600100;
随着信息技术与人工智能技术迅速发展,自动驾驶成为未来交通领域和汽车行业发展变革的主流方向[1]。在发展过程中,从人工驾驶交通流向自动驾驶交通流转化的过程中会经历二者混行的状态。交通指标分析可以为自动驾驶车辆的速度控制策略和跟驰策略的确定提出参考,尤其对处于同一道路的混合交通流而言。对交通流参数和跟驰行为的分析有助于进一步理解交通行为,合理的指标设计将提高驾乘人员的舒适性和对交通的适应性。
目前的研究中,各种安全指标用于在跟驰过程中对驾驶员进行警告,包括车头空距(DHW)、车头时距(THW)和碰撞时间(TTC)等,DHW和THW对交通容量有重要影响[2],可以反映交通效率和交通安全水平。有些研究建议在高速情况下使用THW作为安全指标,在低速情况下使用DHW[3],在长距离情况下使用THW作为指标,在短距离情况下使用DHW作为指标[4]。此外,建议在高速范围内使用THW作为指标,在低速范围内使用THW和TTC的组合[5]。
不同国家(地区)对跟驰行为的分析和比较存在差异[6],英国、法国和德国的驾驶员在跟驰情况下的行为存在显著的THW差异。许多国家建议以2~3 s作为安全分级[7],另有使用更小的1.5 s的THW计算道路可以达到的最大道路通行能力。Pariota等发现驾驶人的DHW均值和离散程度随着车速的增加而增加[8],日本的驾驶员在不同的速度范围下往往需要更长的DHW[9]。综上所述,分析各国车辆跟驰行为和速度控制策略的异同具有重要意义。
为了建立适合不同驾驶人的安全评价体系以及控制策略,特别是未来自动驾驶汽车与人类驾驶汽车共享同一条道路的混合交通,基于自然数据的驾驶行为跨越屏障的研究是十分必要的[10]。目前,对不同的数据集进行分析来比较交通指标的相似性和差异性的研究较少。本文将基于NGSIM和HighD两个开放数据集对美国和德国的驾驶行为和安全指标进行比较研究。
本文首先介绍了两个数据集,给出了提取跟驰对的数据处理过程,并列出了下一部分将讨论的安全指标。然后,从宏观和微观角度展示了来自两个数据集的交通流参数分析。接下来,探讨了不同车道和车型对DHW、THW的影响,以及DHW、THW和TTC与车速范围的关系。然后对相关研究进行了回顾,并与本文的结果进行了比较。最后,对本文进行了总结,并提出了未来工作方向。
1 交通数据和安全指标1.1交通数据1.1.1数据集介绍本文使用的流量数据包括HighD和NGSIM数据集。HighD是由无人机拍摄的德国公路上的自然车辆轨迹[11]。该数据集包括来自6个地点(标记为1至6)的60个记录,时间为16.5 h, 帧频率为25 Hz。NGSIM[12]是从视频拍摄图像中提取的自然车辆轨迹。本文利用HighD数据中2017年9月某个周一在地点1采集的25~34号视频在8:55~13:36的数据和NGSIM的US-101在2005年7月15日7:50am~8:05am的数据,分析了不同车道和车型的指标。其中HighD数据集位置1为双向六车道,NGSIM数据集US-101公路为五个车道,如图1所示。数据集之间的货车比例差异较大。此外,在HighD中,货车和轿车的平均速度分别为80 km/h和120 km/h, NGSIM的平均速度不到40 km/h。基于两个数据集不同的特点,能够从不同方面分析流量特征。

图1 两个数据集中研究路段的布局
1.1.2跟驰事件提取为消除NGSIM数据集存在的噪声影响,本文利用Savitzky-Golay滤波器对NGSIM US-101中的车辆的横纵标准X和Y值中的噪声进行平滑处理,然后对速度和加速度进行微分得到其消除噪声后的结果。
从数据集中提取跟驰对时,同时提取车型,并根据不同的车道对数据进行处理。考虑到两个数据集的记录时间不同,提取时要求NGSIM数据的跟驰持续时间大于30 s, HighD数据的跟驰持续时间大于10 s; DHW应小于200 m; THW应小于6 s。
1.2安全指标本文将研究以下3个安全指标。
(1)车头空距(DHW)。DHW定义为在交通流中从后车的前保险杠到前车的前保险杠的距离。
DHWi(t)=xi-1(t)-xi(t) (1)
式中:xi-1(t)是车辆i-1在t时刻的位置;i-1表示前车;i表示后车。
(2)车头时距(THW)。TTC 是当车辆与前车保持在相同的路径和相同的速度时,预计两车发生相撞的时间。
THWi(t)=xi−1(t)−xi(t)vi(t) (2)ΤΗWi(t)=xi-1(t)-xi(t)vi(t) (2)
式中:vi(t)是车辆i的速度。
(3)碰撞时间(TTC)。TTC是车辆与前车相撞的预期时间,前提是它们保持在相同的路径和相同的速度。
TTCi(t)=xi−1(t)−xi(t)−li−1vi(t)−vi−1(t),∀vi(t)>vi−1(t) (3)ΤΤCi(t)=xi-1(t)-xi(t)-li-1vi(t)-vi-1(t),∀vi(t)>vi-1(t) (3)
式中:li-1是车辆i-1的长度;TTC为正值表示在未来时刻中,如果前车和后车保持相同速度,将发生碰撞,负值表示TTC→ ∞,即不会发生碰撞。
2 交通流参数描述本文对交通流参数的分析包括宏观分析和微观分析两部分。
2.1交通流参数宏观分析交通流的宏观参数分析,包括流量、平均速度及其与DHWmin和THWmin的关系。
HighD数据集使用位置1处某个周一的25~34号视频。图2显示了每个视频中每条车道的车辆总数。分析每条道路的车辆总数与货车比例之间的关系,结果显示不同车道之间存在明显差异,且上下行道路区别较大。右侧车道上货车的比例几乎超过50%,中间车道约为10%,左侧车道不到5%。因此,各车道间货车比例的偏差是判断货车是否对交通产生影响的指标之一。
在NGSIM数据集中,货车比例低于5%。车道1的轿车数量为385,货车数量为1;车道2中轿车数量为480,货车数量为1;车道3中的轿车数量为503,货车数量为15;车道4中的轿车数量为507,货车数量为28;车道5的轿车数量为527,货车数量为27。
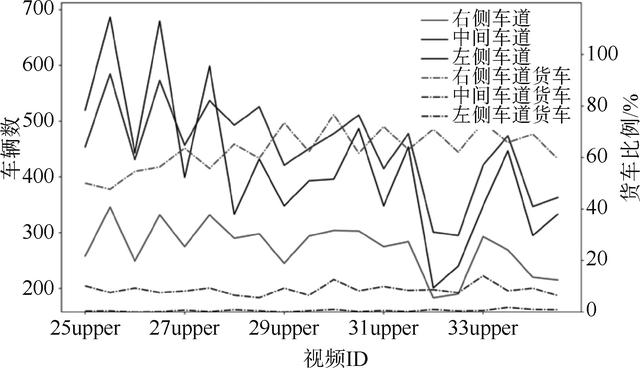
图2 在L1(左Y轴)每条车道上的车辆总数和 每条车道上货车的相对比例(右Y轴)
HighD数据中提供了采集时段内所有车辆DHWmin和THWmin的平均值,探讨平均流速与安全指标之间的关系,对平均DHWmin和THWmin进行了分析。图3(a)描述了平均速度与平均DHWmin之间的正相关关系。相关系数分别为RrightLane=0.955 937、Rmiddlelane=0.971 483、Rleftlane=0.915 015。图3(b)描述了平均速度与平均THWmin之间的正相关关系。相关系数分别为RrightLane=0.821 228、Rmiddlelane=0.789 086、Rleftlane=0.744 493。结果说明随着平均流速的增加,THWmin和DHWmin将呈现减小的趋势。
2.2交通流参数微观分析从以上分析可知,上、下行道路在车辆数量和平均车速上存在明显差异。因此,本文针对两个数据集不同车道上的速度分布进行研究。
2.2.1不同车道上的速度分布如图4(a)所示,在HighD数据集中,速度分布呈现出双峰的特性,两个速度峰值分别代表约 85 km/h 处的货车速度峰值和115 km/h处的轿车速度峰值。图4(b)显示了NGSIM轿车速度在40~55 km/h之间的高频率,意味着高度拥挤状态。对于HighD数据集,本文选择流量为5 090 veh/h的在早高峰时段9:00am录制的视频26来表示拥挤状态的交通;以流量为3 356 Veh/h在中午12:20pm录制的视频32表示非拥挤状态的交通。
对比图5(a)~图5(c),车道间的差异随着拥挤程度的降低而增大,因此图5(b)比图5(a)表现出更大的变化。在图5(c)项中,车道之间的变化要小得多,差异可能是因为在NGSIM数据拥挤的情况下,驾驶员的驾驶风格会对交通流量产生很大的影响。另外,货车百分比的不同可能是造成车道间速度变化的一个原因。

图3 平均流速与DHWmin或THWmin的关系
2.2.2轿车和货车的速度分布在以上针对不同车道讨论的基础上,我们引入了不同车型作为第二个变量。从图6(a)中可以看出,在拥挤交通条件下,轿车与货车的速度差值小于非拥挤交通条件下;对三个车道的比较,右侧车道货车与轿车之间速度的差值最小,其次是左侧车道,中间车道的两车型速度差最大。左侧车道,轿车平均车速为76.17 km/h, 货车平均车速为81.26 km/h; 中间车道上,轿车平均车速为75.32 km/h, 货车平均车速为74.50 km/h; 右侧车道上,轿车平均车速为69.61 km/h, 货车平均车速为68.73 km/h。如图6(b)所示,在左侧车道上,轿车的平均速度为155.55 km/h, 货车的平均速度为110.32 km/h; 中间车道上,轿车平均车速为105.52 km/h, 货车平均车速为89.95 km/h; 右侧车道上,轿车平均车速为91.16 km/h, 货车平均车速为83.16 km/h。这意味着在不拥挤的情况下,中间车道上的车型对速度分布的影响最大。图6(c)显示轿车的平均速度为42.44 km/h, 货车为46.30 km/h, 与图6(a)相差不大,趋势相同。

图4 两个数据集的速度分布

图5 不同交通状态下不同车道的速度分布
从图6中我们可以得出结论:在拥挤的情况下,货车和轿车的速度几乎相同,而在不拥挤的情况下,中间车道的变化最大。
3 安全指标分析在对两个数据集的交通状态有了基本的了解之后,我们从HighD数据集的视频25~34和NGSIM-US101 7:50~8:05时段的数据中提取了跟驰行为,探讨了两个数据集不同的跟驰特征。
3.1DHW分布图7给出了HighD和NGSIM的DHW频率和累积频率。HighD的DHW频率峰值出现在25~30 m之间,NGSIM的DHW频率峰值出现在15~20 m之间。这意味着在所研究的时间段内,驾驶员在跟驰情况下倾向于在这个DHW范围内驾驶。较大的DHW存在频率逐渐降低。
3.1.1不同车道上的DHW分布图8(a)中的三个车道相比,DHW的峰值频率从左车道向右车道依次增加。此外,左侧车道的平均DHW为24.95 m, 中间车道的平均DHW为34.65 m, 右侧车道平均DHW为47.45 m。在图8(b)中,左侧车道的平均DHW为32.98 m, 中间车道的平均DHW为44.60 m, 右侧车道的平均DHW为59.74 m。因此,从拥挤状态到非拥挤状态,各车道的DHW都在增加,且左侧车道DHW最小,右侧车道DHW最大。这意味着车辆速度较高的车道具有较小的DHW。在图8(c)中,在NGSIM的车道1的平均DHW为22.61 m, 车道2为23.04 m, 车道3为23.08 m, 车道4为24.96 m, 车道5为25.58 m。因此,在NGSIM中,速度越高,DHW越长。HighD和NGSIM两个数据集呈现出两种不同趋势,这可能是因为不同货车比例的原因。因此,接下来我们将探讨货车对DHW的影响。

图6 不同车辆在不同车道上的速度分布

图7 两个数据集的DHW分布
3.1.2不同车型的DHW分布轿车和货车的DHW分布如图9所示。在图9(a)中,轿车的平均DHW为32.53 m, 货车为35.22 m。在图9(b)中,轿车的平均DHW为41.22 m, 货车为47.64 m。在图9(c)中,轿车的平均DHW为23.45 m, 货车为35.05 m。因此,这可能是在高速行驶中,高速的左车道车辆DHW较小的原因之一是左车道的货车比例很低。
3.2THW分布与DHW的分析类似,图10显示了THW分布的频率和累积频率。HighD最高频THW出现在1~1.5 s范围内和NGSIM最高频THW出现在1.5~2 s范围内。

图8 DHW在不同车道上的分布

图9 不同车型的DHW分布
通过图7和图10相比,我们可以看到THW和DHW的趋势相似,而且DHW和THW的分布图都在右侧呈现出一个长尾趋势。
3.2.1不同车道上的THW分布对比图11(a)中的三个车道THW分布情况,可以看出THW的峰值频率从左车道向右车道增加。此外,左侧车道的平均THW为1.41 s, 中间车道为1.65 s, 右侧车道为2.45 s。在图11(b)中,左侧车道的平均THW为1.02 s, 中间车道为1.53 s, 右侧车道为2.51 s。所以,左车道的THW最小,右车道的THW最大。这意味着车辆行驶速度高、货车比例低的车道具有较小的THW。在图11(c)中,对于NGSIM,车道1上的平均DHW为2.46 s, 车道2为2.17 s, 车道3为2.11 s, 车道4为2.12 s, 车道5为2.12 s。在NGSIM中,3~5车道的速度几乎相等,THW也是如此。与1号和2号车道相比,车速较高的车道THW较小。接下来,我们将探讨车型对THW的影响。

图10 两个数据集的THW分布

图11 不同车道上THW的分布
3.2.2不同车型的THW分布从图12(a)中可以看出,轿车的平均THW为1.55 s, 货车为1.70 s。从图12(b)中可以看出,轿车的平均THW为1.41 s, 货车为1.77 s。从图12(c)中可以看出,轿车的平均THW为2.21 s, 货车为2.67 s。因此,货车通常比轿车具有更高的THW值。
3.3车道和车型对DHW、THW和速度的影响为了检验车道和车型对THW和DHW的影响,首先对数据进行方差齐性检验,数据没有通过。因此,采用单因素方差分析(ANOVA)检验(即Kruskal-Wallis检验)来检验不同情景下的DHW/THW是否存在统计学差异。然后使用非参数Mann-Whitney检验来判断在每种情景下任何两个DHW/THW之间是否存在统计差异。

图12 不同车型THW分布
3.3.1不同车道对于HighD或NGSIM数据,图13和表1给出了HighD和NGSIM中不同车道THW/DHW分布的非参数检验结果,除了NGSIM中车道2和车道3上的DHW外,其余车道上的THW和DHW都显著不同(p值小于0.10)。出现这种情况的可能是因为NGSIM中有多个车道,而相邻的车道2和3之间的差异较小。

图13 考虑车道变化时DHW和THW的比较
表1 不同车道DHW和THW的统计比较
|
数据集 |
车道位置 |
平均DHW/m |
标准DHW/m |
平均THW/s |
标准THW/s |
|
HighD |
左侧 |
33.139 |
17.42 |
1.28 |
0.66 |
|
中间体 |
40.757 |
22.92 |
1.59 |
0.87 | |
|
右车道 |
523.00 |
29.46 |
2.38 |
1.27 | |
|
NGSIM |
lane1 |
22.60 |
10.17 |
2.43 |
1.01 |
|
lane2 |
23.04 |
9.48 |
2.15 |
0.85 | |
|
lane3 |
23.05 |
9.37 |
2.09 |
0.81 | |
|
lane4 |
24.50 |
9.96 |
2.10 |
0.80 | |
|
lane5 |
24.86 |
10.67 |
2.07 |
0.87 |
结果表明,在HighD数据集中,不同车道的THW和DHW存在显著差异,显著性水平为0.10。对于NGSIM而言,lane2和lane3的DHW没有显著性差异,而其他车道的DHW和THW都有显著性差异。
此外,为了更清楚地显示不同车道的DHW和THW的变化趋势和不同,图14给出了不同车道上THW和DHW的累积频率。

图14 不同车道上DHW和THW的累积频率
3.3.2不同车型对于HighD或NGSIM,图15和表2给出了各DHW/THW的相关非参数检验结果,Kruskal-Wallis检验的结果表明,在0.10的显著性水平上,不同的DHW和THW类型有显著性差异。然后,使用Mann-Whitney U检验来检验其中任何两种车型是否也在统计上存在差异。结果如表2所示,C-C表示轿车跟随轿车;C-T表示轿车跟随货车;T-C表示货车跟随轿车;T-T表示货车跟随货车。除C-T与C-C之间的DHW和T-C与T-T之间的THW的p值外,其余p值均小于0.10。这意味着只有这两对之间没有显著差异。但总体而言,不同轿车和货车跟驰对的DHW、THW存在显著差异。

图15 考虑汽车类型的DHW和THW的比较
表2 不同车型DHW和THW的统计比较
|
数据集 |
车辆对 |
平均DHW/m |
标准DHW/m |
平均THW/s |
标准THW/s |
|
HighD |
C-C |
32.839 0 |
20.641 1 |
1.573 2 |
0.866 3 |
|
T-C |
49.326 1 |
32.571 9 |
2.746 0 |
1.364 4 | |
|
C-T |
35.635 7 |
25.522 0 |
1.856 6 |
1.039 6 | |
|
T-T |
53.302 8 |
29.711 8 |
2.678 6 |
1.260 0 | |
|
NGSIM |
C |
23.345 0 |
9.852 6 |
2.191 5 |
0.892 1 |
|
T |
31.273 0 |
10.797 9 |
2.599 4 |
0.887 0 |
考虑到NGSIM中货车比例较低,在这里,我们只考虑当前车型来做分析。结果表明,对于NGSIM,轿车和货车的DHW和THW存在显著差异,显著性水平为0.10。
此外,为了更清楚地显示不同车型的DHW和THW的变化趋势和不同,DHW和THW在不同车道中的累积频率也在图16中给出。
3.4考虑车型的不同速度范围内THW、DHW和TTC的频率为了更清楚地比较考虑车辆类型的不同速度范围下的安全指标分布,图17给出了以下分析。考虑到货车数据量太小,在NGSIM中只考虑C-C。
图17(a)和图17(e)给出了在HighD和NGSIM中具有不同速度范围的C-C的THW、DHW和TTC分布的比较。它们有一个共同的特点:对于较高的速度,THW保持一个稳定的状态。对于V>45 km/h的HighD数据,THW的最高频率保持在1 s左右,而V>30 km/h的NGSIM数据,THW的最高频率保持在1.7 s左右。对于较低的速度下,THW随速度减小而增大,这在之前已经得到了验证。在两个数据集中,DHW随速度增加而增大。在HighD数据中时,当V<90 km/h时,TTC保持在一个稳定值,而TTC随着速度的增加而增加。这表明对于C-C来说,THW是一个更好的高速状态下的跟驰安全指标,而THW和TTC的组合在低速范围内表现得更好。
对比图17(a)~图17(d),不同的车辆跟驰对具有不同的性能。在图17(b)中,C-T显示出与图17(a)不同的趋势。当V<90 km/h时,THW保持在1 s左右的稳定状态。当V>90 km/h时,C-T

图16 不同车型的DHW和THW累计频率
平均THW大于C-C,C-T平均DHW大于C-C。这意味着,如果轿车以高速跟随一辆货车,一定比例的汽车驾驶员将保持较长的距离,从而引起THW和TTC的增加。这表明,对于C-T,THW是较好的低速跟驰行为安全评价指标,但对于高速跟驰,所有指标的范围都很大,THW与TTC组合使用可能会有较好的性能。
在图17(c)中,对于T-T跟驰对,安全指标具有与C-C跟驰对相似的性能。THW在1.7 s左右保持稳定,高于C-C跟驰对。当速度降低时,它会增加。DHW随速度增加而增加,但距离比C-C跟驰对长。当V<90 km/h时,TTC保持在一个稳定值,当速度增加时,TTC增加。这说明对于T-T来说,THW是一个较好的高速跟驰行为安全评价指标,而THW和TTC的组合在低速范围内表现更好。
在图17(d)中,对于T-C跟驰对,由于数据量比其他三种情况少,所以曲线并不平滑,但我们可以发现,当速度增加时,DHW增加,且幅度最大。无论在什么速度范围内,TTC都保持稳定状态。THW的最高频率在一个较大的范围内,这意味着货车跟在一辆轿车后面的跟随范围会更大。这表明对于C-C跟驰对,TTC在整个速度范围内是一个较好的跟驰安全评价指标。
4 结论和建议本文介绍了两个开放数据集的流量状态。从宏观方面探讨了车辆数量与货车比例、平均车速与DHWmin和THWmin的关系,然后从微观方面介绍了两个数据集的速度分布特征,分析了交通状态、不同车道和车型等参数对交通流参数的影响;其次,针对车辆跟驰情况,研究了基于不同车道和车型的DHW和THW等安全指标;最后探讨了安全指标(DHW,THW,TTC)在速度范围内的关系,为不同指标的应用提供建议。
(1)对于HighD数据,货车比例是影响三个车道不同交通状态的一个重要因素。左侧车道承载了最多的车辆数、最高的平均车速以及最低的货车比例(小于5%);右侧车道承载了最少的车辆数、最低的平均车速以及最高的货车比例(大于50%);中间车道承载的车辆数、平均车速以及货车比例(10%左右)都介于左右侧车道之间。
(2)对于HighD数据而言,各车道上的平均速度与DHWmin和THWmin有很强的正相关关系。
(3)轿车的DHW在HighD中的最高频率值高于NGSIM,而THW在HighD中的最高频率值低于NGSIM。

图17 两个数据集中不同速度范围的安全指标分布
(4)不同车道、不同车型对指标的分布有较大影响。
(5)对于C-C和T-T两种跟驰对而言,THW都是适用于高速条件下跟驰行为较好的安全评价指标;对于低速条件都可以使用THW和TTC组合,但C-C和T-T跟驰的指标取值范围不同。对于C-T跟驰对,THW适用于低速,对于T-C跟驰对,TTC可作为全速度范围内的评价指标。
这项工作的局限性包括以下几点:(1)基于本研究和本文综述的其他研究可以看出,许多环境因素对驾驶行为有一定影响,因此,今后的工作将对这些因素进行深入探讨;(2)本文只考虑了车辆的跟驰行为,但对于自动驾驶车辆控制系统来说,变道行为也是一个重要的考虑因素。未来的工作还将尝试研究不同国家(地区)的变道行为。
参考文献[1] 李克强,戴一凡,李升波,等.智能网联汽车(ICV)技术的发展现状及趋势[J].汽车安全与节能学报,2017,(1).
[2] Grienshields B.The photographic method of studying traffic behav- ior[M].Proceedings of the Thirteenth Annual Meeting of the Highway Research Board,1993.
[3] Chen X M,L Li,Q Shi.A Markov Model Based on Headway/Spacing Distributions.In Stochastic Evolutions of Dynamic Traffic Flow[J].Springer,2015:49-79.
[4] Vogel K.What characterizes a “free vehicle” in an urban area?[J].Transportation research part F:traffic psychology and behaviour,2002,5(1):15-29.
[5] Liu T.Comparison of Car-Following Behavior in Terms of Safety Indicators Between China and Sweden[M].IEEE Transactions on Intelligent Transportation Systems,2019.
[6] Winkelbauer M,M Donabauer,A Pommer,R Jansen.Naturalistic data on time headway behind motorcycles and other vehicles[J].Safety science,2019,119:162-173.
[7] Bonsall P,R Liu,W Young.Modelling safety-related driving behaviour—impact of parameter values[J].Transportation Research Part A:Policy and Practice,2005,39(5):425-444.
[8] Pariota L,G N Bifulco,F Galante,A Montella,M Brackstone.Longitudinal control behaviour:Analysis and modelling based on experimental surveys in Italy and the UK[J].Accident Analysis & Prevention,2016,89:74-87.
[9] Sato T,M Akamatsu,P Zheng,M McDonald.Comparison of car following behavior between UK and Japan[J].In 2009 ICCAS-SICE,IEEE,2009:4155-4160.
[10] 田丽萍,朱弘戈,朱晓东,等.面向高速公路匝道合流区通行效率的车路协同限速方法[J].公路,2019,64(8):315-321.
[11] Krajewski R,J Bock,L Kloeker,L Eckstein.The HighD dataset:A drone dataset of naturalistic vehicle trajectories on german highways for validation of highly automated driving systems[M].In 2018 21st International Conference on Intelligent Transportation Systems (ITSC),IEEE,2018:2118- 2125.
[12] FHWA.Next Generation Simulation (NGSIM) [M].2019.
,免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。文章投诉邮箱:anhduc.ph@yahoo.com






