无锡常见助力机械手原理(助力机械手的升降系统组成及操作原理)
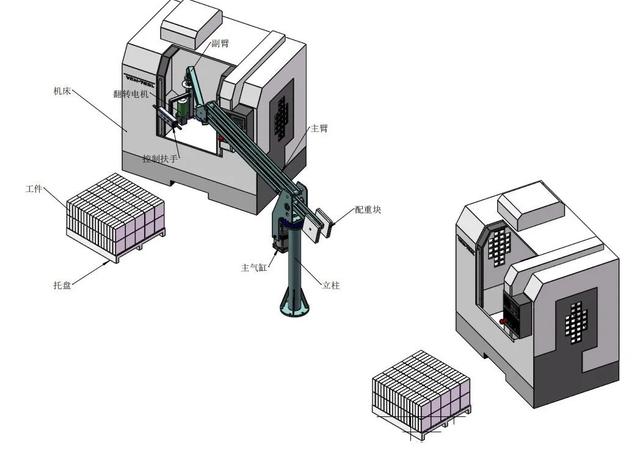
助力机械手又称平衡器、平衡环、气动助力器等,因为其具有省事,省力的特点,被广泛应用于现代工业中的各个领域,如:大型物料的移载,转移,大型设备的准确定位、装配等场合,总归,在现代出产中,不管原料的承受还是半成品的加工、生产、配送等环节,气动机械手都发挥着不可代替的效果。助力机械手的基本原理是运用负载检测及气压反应对吊运的工件完成主动平衡,以便使工件“悬浮”于空中。这样在一定的空间内,操作者只需对工件运用较小的推力或拉力,就可以损坏气压平衡,使工件轻松、高效的完成自在转移。

助力机械手
助力机械手升降系统的机械结构包括升降设备和升降传感器。升降设备首要是指升降系统的驱动设备,传动设备和测量设备。操作者有竖直方向上的运动趋势时,升降传感器测量其操作力信号,上位机依据测量值经过下位机给直流伺服电机施加不同驱动电压,驱动电机带动滚筒升降物料。此时操作者施加的操作力只为供给竖直方向上的运动趋势,并非实际的驱动力。
助力机械手升降设备主要由直流伺服电机、光电编码器、电机减速器、滚筒和钢丝绳组成。
助力机械手的减速器的输入端连接着直流伺服电机的输出轴,输出端与完成钢丝绳的缠绕的滚筒相连接。控制系统将升降传感器检测到的操作力信号转换为驱动信号,驱动直流伺服电机。驱动电机经过减速器带动滚筒滚动。与电动机同轴连接的光电编码器,对电动机的转速进行测量。测量信号作为系统的反应信号,传给控制器控制后,然后完成升降系统的闭环控制。升降系统的减速器选用蜗轮蜗杆减速器,它降速时可以提高扭矩,并起到自锁的效果。
助力机械手的升降传感器首要用于检测竖直方向上的操作力,即得到操作者的运动趋势。助力机械手操作者经过升降传感器将运动趋势信号,即物料将进行的上升或许下降的运动信息,收集到控制系统。助力机械手控制器依据得到的运动趋势信号供给升降物料的驱动力。驱动力将经过钢丝绳的缠紧与放松完成操作者的操作趋势。
助力机械手升降传感器由三个部分组成:联接部件、控制把手和承重部件。联接部件是将传感器把手和钢丝绳进行联接的部分。助力机械手控制把手的首要组成部件有:紧缩绷簧、滑动式电位计、套筒和承重主轴。紧缩绷簧有两个,均处于紧缩状况分别放置套筒上端和下端的内部。两个绷簧使用相反的预紧力,对套筒供给支撑效果和位置归零效果。电位计对操作者的操作力进行测量,它的滑动端与套筒相连接。
,免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。文章投诉邮箱:anhduc.ph@yahoo.com






