水声探测的技术(艇载成像探测系统技术研究进展及其应用方向)
原文作者:李道京;郑浩;周凯;高敬涵
简介
文章介绍了平流层艇载微波载荷技术的研究进展,分析了基于衍射光学系统的艇载光学载荷技术及其应用方向。根据现有飞艇平台承载能力,提出艇载光学载荷的发展,应重点突破大口径轻量衍射光学系统关键技术,首先发展红外目标成像探测系统,同时积极探索激光和红外共孔径,以及新型非制冷红外探测器问题;艇载微波载荷的发展,应重点突破共形轻量化天线关键技术,系统在总体设计上,应考虑成像探测一体化和主被动结合技术体制。
1、引言
平流层飞艇可在20km以上高空长时间驻留,这为其在通信服务、高空成像探测、遥感[1]等领域的应用提供了有利条件。平流层飞艇长在100m量级,直径在30m量级,飞艇巨大的体积不仅可满足微波载荷大尺寸天线的布设要求,由于工作在高空大气影响小,也为大口径光学/红外载荷的应用提供了一个新型平台,深入研究艇载成像探测系统技术并分析其应用方向具有重要意义。
本文介绍了艇载微波载荷技术的研究进展,重点分析了基于衍射光学系统的艇载光学载荷技术及其应用方向,明确了相关关键技术。针对现有平流层飞艇平台供电和承载能力有限的特点和应用需求,提出了发展建议。
2、艇载微波载荷系统
2.1 主动雷达
艇载主动雷达的典型代表为美国的ISIS系统[2]。ISIS缩比艇X波段雷达天线阵面积为98 m2,由约35万个TR构成, UHF波段天线阵面积为530 m2,由4万个TR构成,采用柱面天线形式(未成功)。 正式艇X波段雷达天线阵面积将达到5725 m2,组件数将近2030万个,UHF雷达可以搜索600 km外的空中目标。其天线以有源阵为主,对重量密度要求很高,需达到2 kg/m2。由于ISIS缩比艇试验未能成功,其项目进展近年来已很少报道。
国内也开展了艇载主动雷达研究工作[3],为在有限的体积重量约束条件下获得较高的空间分辨率,对艇载稀疏阵列天线雷达技术也进行了研究[4],[5],文献[6]研究了基于子阵结构稀疏阵列天线艇身共形设置问题,其主要应用方向为目标探测和对地成像。
由于飞艇供电能力有限,需大尺寸接收天线才能实现远距目标探测,目前重量密度小能实现大尺寸的轻量天线波段在P和L,但其对地成像能力较差。P波段具有较好的小目标探测性能,由于其背景干扰较多,L波段轻量天线发展也应关注。
飞艇运动速度较慢,选用小尺寸天线X波段对地SAR成像时,在目标距离30 km 分辨率1 m条件下,全孔径成像积分时间需1分钟。由于成像时间很长,作用距离也不远(仅几十公里),应用前景还不明确。
未来若X波段天线实现轻量化,飞艇即可使用大尺寸天线实孔径成像和合成孔径成像结合方式,提高成像速度。基于长稀疏阵列天线,文献[7]研究了共形稀疏阵列形变误差补偿和对地稀疏成像问题。选用大尺寸阵列,除有利于对地成像外,目标探测时也可获得高的测角精度。
图1 艇载共形稀疏阵列天线对地成像雷达工作示意图
现阶段在飞艇上装X波段大尺寸稀疏阵列困难,但形成一个正交长基线InISAR用于运动目标二维和三维成像还是可能的,这将有助于提高目标识别能力。文献[9]研究了地基运动目标毫米波三维成像问题,其对空中飞机目标的三维成像结果如下图所示,相关概念和技术可用在飞艇平台。
图2 地基正交基线毫米波InISAR对空中飞机的三维成像结果
2.2 外辐射源雷达
主动雷达系统要获得远的探测距离,除要使用大尺寸天线以外,还需要有较大的信号发射功率,对飞艇供电能力要求较高。针对平流层飞艇供电能力有限的特点,可考虑设计主被动结合的艇载雷达探测系统,在必要时使用外辐射源信号(地面广播、电视信号和合作辐射源等),以在低功耗条件下实现目标远距离探测。
文献[10],[11]提出了把稀疏阵列用于艇载外辐射源雷达的设想,设计了系统参数并分析了艇载共形稀疏阵列外辐射源雷达的目标探测性能。分析表明,外辐射源大的EIRP和艇载接收天线大的面积,是保证其目标探测性能的基础。
使用地面外辐射源信号,雷达受地球曲率的影响,其通视探测距离有限,为此可考虑使用天基外辐射源,双站观测结构条件下目标RCS也较大,主要有遥感雷达卫星、GNSS导航卫星和通信卫星。遥感雷达卫星落地功率密度较大,可用于外辐射源目标探测,但由于目前数量有限,通常处于低轨,不能满足区域连续观测的需求。数量较多的GNSS导航卫星和高轨通信卫星,为区域连续观测提供了条件,针对成像探测需求,目前开展的研究工作也很多[12],[13],但由于其落地功率密度比遥感雷达卫星低3-5个数量级,作用距离较小应用能力有限。这也许是通导遥一体化研究工作进展缓慢的一个原因,现阶段发射高轨遥感雷达卫星如GEOSAR,应有助于外辐射源雷达的发展和应用。
2.3 无源探测
在艇上安装宽带天线,通过接收100 MHz ~ 20 GHz频段范围的所有信号,包括雷达、通信、数据链、广播甚至步话机的信号,经信号分选也可实现目标无源探测。
无源探测目前主要有基于多站信号时差定位[14]和干涉测角两种体制。由于属于一次雷达被动探测,其探测距离通常较远。
平流层艇为长基线高精度干涉测角定位提供了有利条件,假定基线长度为100 m,通过两条艇的双基线测角信息关联,对100 MHz信号源在100 km处,无源探测的定位精度即可达到0.5 km量级。
由于无源探测艇载设备量小,作用距离远,多站关联目标定位精度高,技术成熟,其艇载应用很值得关注和发展。
2.4 关键技术
2.4.1 轻量天线
天线面积直接影响平流层艇雷达的性能,目前看来要有一定的实用价值,艇载雷达天线面积至少也应在50 ~ 100 m2量级。ISIS项目X和UHF双波段雷达天线的重量密度为2 kg/m2,这对天线的轻量化提出了很高的要求,在器件全面芯片化和微系统化的同时,天线与艇身和气囊需实现共形集成[15]。由于将以数字阵列为主,且涉及材料和器件等基础问题,轻量天线技术是艇载雷达的核心关键技术,需深入研究。从现阶段的研究工作看,薄膜天线[16],[17]和基于FR4薄膜贴片 PMI泡沫子阵结构的稀疏阵列天线(长度可在60 m量级)都是艇载轻量天线的重要形式。
2.4.2 分布式位置和姿态测量系统
巨大尺寸的天线装载在飞艇上难免有阵列形变,其形变误差可通过分布式位置和姿态测量系统(POS)进行测量[18],获得阵列形变误差后在方向图形成过程中实施误差补偿,故分布式POS对大尺寸天线理想方向图形成具有重要意义,事实上在ISIS项目[2]中也安排了基于多点GPS的测量和校准装置。
目前单节点差分GNSS的位置测量精度约在3 ~5 cm量级,已基本满足P和L波段阵列形变误差测量要求。在阵列上设置参考点,并以其为参考对每个节点的GNSS信号实施差分处理,在500 m区间节点间的相对位置精度可达到2 mm,这意味着艇载天线的阵列形变相对误差测量精度也可能达到2 mm量级,并使X波段阵列形变误差的高精度补偿成为可能。我国高分辨率对地观测系统重大专项,支持了单节点重量100 g分布式POS的研制工作,相关技术和产品可用于艇载微波载荷系统。
3、 艇载光学载荷系统
3.1 激光雷达水深探测
由于需求明确,近年来机载激光雷达探测技术发展迅速并获得广泛应用[19],现阶段激光雷达的艇载应用问题也需考虑。衍射光学系统[20]具有轻量化特点尤其适用于激光雷达,使用大衍射口径可提高激光雷达探测性能。飞艇平台为大衍射口径激光雷达的安装提供了有利条件,由于不存在收拢展开过程,大口径衍射光学系统的工程实现也较为简单。文献[21]提出了艇载1 m衍射口径激光通信和干涉定位系统概念并分析了其性能,该系统在10 m基线下,其作用距离将达到4亿公里,激光波长1.064 μm时对应的定位精度在6 km量级,可用于深空探测。若艇载激光雷达口径达到1 m并采用相干探测体制,其对地面和空中目标探测距离将会大幅提高。基于大口径接收衍射光学系统,本文主要分析了艇载激光雷达海水深度探测性能。
3.1.1 主要指标
激光波长:532 nm
小口径发射望远镜:1个
发射望远镜下视扫描视场:15°×5°
接收望远镜口径:2 m
接收望远镜数量:3个
接收望远镜下视观测视场:15°×5°
每个接收望远镜覆盖视场:5°
3.1.2 望远镜布局
系统的安装方式可采用艇腹悬挂方式,设置1个小口径发射望远镜和3个大口径接收望远镜,小口径发射望远镜通过扫描覆盖视场15°×5°,每个大口径接收望远镜覆盖视场5°,通过3个覆盖15°×5°。
较大口径接收望远镜机械转动不便,需设置折反射镜并通过折反镜的二维机械扫描可实现较大的工作视场。采用透射式衍射光学系统时,通过光路压缩,可大幅减少折反镜的尺寸,便于二维机械扫描的实现[21]。假定使用10:1压缩光路,要实现5°的扫描范围,折反镜的旋转范围应达到25°。
图3 1个发射望远镜和3个大口径接收望远镜在艇腹悬挂布设示意图
3.1.3 观测性能分析
当飞行高度20 km,激光雷达下视扫描视场为15°×5°时,海面覆盖范围为5.2 km×1.8 km,飞艇低速运动的特点,使基于激光波束扫描方式实现宽覆盖范围成为可能。
目前水深测量激光雷达波长以532 nm为主,文献[19]介绍我国的机载双频激光雷达海水测深已达到51 m。文献[22]对机载海洋激光测深系统参量设计与最大探测深度能力进行了分析,当接收望远镜口径在240 mm,光谱接收范围为0.5 nm,飞行高度500 m时,其海水探测深度为49 m。
轻量的衍射光学系统不仅容易实现大接收口径,而且容易获得窄的光谱接收范围,尤其适用于激光雷达。在近岸水域海水漫射衰减系数0.08,其他参数不变条件下,当接收望远镜衍射口径扩大到2 m,光谱接收范围为0.01 nm(对应信号带宽为10.6 GHz),单脉冲能量约50 mJ时,根据文献[22]公式计算,激光雷达海水探测深度约为80 m。
显然,使用较大接收口径的衍射光学系统,大幅提高了激光雷达的水深探测性能。要在20 km航高保证激光雷达的探测性能,应引入单光子探测技术[23]并考虑研制基于激光本振的新型探测器。
3.2 红外目标探测
目前有关艇载红外成像探测系统的报道不多,飞艇平台为大衍射口径红外相机的安装提供了有利条件。基于衍射光学系统,本文分析了口径在1 m量级的红外相机的目标探测性能。
3.2.1 主要指标
红外谱段范围:长波
红外光谱范围:约0.2 μm
望远镜口径:1 m
观测视场:30°×5°
望远镜数量:6个
每个望远镜覆盖视场:5°×5°
3.2.2 望远镜布局
系统的安装方式可采用艇腹悬挂方式。设置6个望远镜并形成三角布局,每个望远镜覆盖视场5°,再辅以艇身的整体转动,以实现宽视场观测。
图4 6个望远镜在艇腹的布设示意图
3.2.3 观测性能分析
衍射光学系统具有大口径轻量化的优点,但其光谱范围较窄,当用于红外相机时,即便采用色差校正[24],所能利用的信号能量也将大幅降低,一般认为红外探测距离会大幅下降。假定衍射光学系统的光谱范围仅为传统光学系统光谱范围的1/20,探测距离在原理上将减少至原来的1/4.5,这使其红外应用受到影响。衍射光学系统轻量的特点使其大口径容易实现,增加其直径4.5倍,其红外探测距离也可以保证。
上述红外探测距离通常用于对地成像场合,当红外相机用于目标探测时,考虑到地物背景和目标光谱特性不同,衍射光学系统窄的光谱范围,实际上有助于地物背景和目标分离,并将有利于目标探测。
假定探测器光谱范围为8 ~12 μm,且目标和背景的辐出度光谱特性相同,当输入主镜使用衍射光学系统后,其可用的光谱宽度缩小为0.2 μm(如10.7~10.9 μm),由红外探测距离方程[25]知,当积分区间减少为原来的1/20时,目标和背景亮度均会缩减为原来的1/20,从而使得信噪比同比降低。
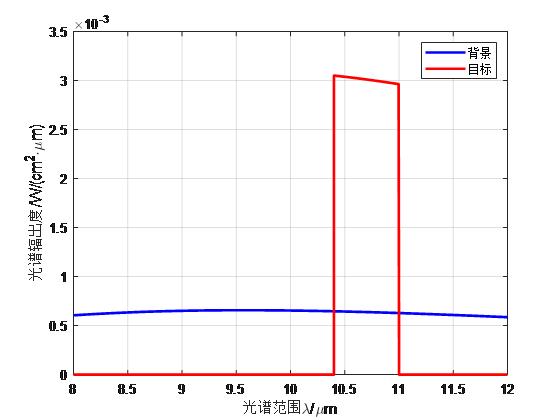
当目标和背景的光谱特性不同,典型的如目标光谱范围本身就较小在0.6 μm量级,如下图所示。目标辐出度对波长的响应强点主要集中在10.6 ~ 11 μm光谱范围内,其余幅值较小,为简化问题,将其置零。输入主镜使用衍射光学系统后窄谱段的目标亮度减小为原来的1/3,而背景亮度减小为原来的1/20,此时两者差的绝对值并不会同比下降而导致信噪比也同比大幅降低。这表明,在一定条件下红外相机的探测性能不会因为衍射光学系统的使用而大幅下降,而通常目标和背景光谱特性不同的特点,也为衍射光学系统的使用提供了机会。
图5 目标/背景温差1K时的辐出度光谱曲线
对地观测时,假设背景为夏季草地,在距离15 km处,针对不同温度的车辆目标,对一个衍射口径10 mm,采用非制冷长波红外探测器(像元尺寸14 μm,噪声等效温差40 mK)红外相机信噪比进行了分析。分析表明当目标和背景光谱特性相同时,系统对温差5 K的目标信噪比可优于1;当目标和背景如图5所示的光谱特性不同时,系统对温差1 K的目标信噪比可优于9。
当其他参数不变,当衍射口径扩大到1 m时,红外相机对目标的探测距离将优于150 km。当大气透过率由15 km的0.75降低到0.2,红外相机对目标的探测距离也会优于75 km。
显然,在地物背景和目标光谱特性不同的条件下,基于衍射光学系统的红外相机仍可能具有良好的目标探测性能。
3.3 红外干涉成像天文观测
在中科院鸿鹄专项中,已安排了临近空间35km高度球载行星大气光谱望远镜[26]的研制任务,该望远镜口径0.8m,有7个紫外谱段和4个可见谱段。选择高空球载平台,可回避大气影响,有利于天文观测。
基于两个(或多个)望远镜长基线干涉成像方法,可等效实现口径为基线长度望远镜的分辨率,其原理也可用光学合成孔径成像概念来解释。平流层飞艇具有巨大的体积和设备安装空间,其望远镜口径最大可达10m量级,干涉基线长度可达30m量级,这为天文观测所需的长基线大衍射口径望远镜的安装提供了有利条件。本文对一个衍射口径在2m量级,干涉基线在10m量级采用激光本振的系统性能进行了分析。
3.3.1 主要指标
红外谱段范围:短波
红外中心波长:1.55 μm
红外光谱范围:约0.1 μm
望远镜观测视场:约3°
接收望远镜口径:2 m
接收望远镜数量:3(三角布局)
干涉基线长度:10 m
干涉测角精度:0.15 μrad量级
等效形成口径10 m望远镜观测能力
该10 m基线2 m衍射口径红外干涉成像系统,其望远镜选用膜基衍射光学系统,以大幅减少重量;设置激光本振和相干探测器保证望远镜间的红外信号相位的正确传递,在电子学实施窄带滤波形成窄带红外信号(带宽约5 GHz)以利于实现长基线干涉成像。
在此基础上,有望类似综合孔径射电望远镜[27],[28],[29],通过不同空间位置的较小孔径,组合形成一个大的光学口径,实现高分辨率成像,这有可能大幅减少红外成像系统的复杂度和体积重量。
3.3.2 望远镜布局
为实现正交观测,可设置3个三角布局的望远镜。系统的安装方式可采用艇腹悬挂或艇身内置方式。艇身内置方式下,该系统在艇身顶部的布设示意图如下所示,要求艇为望远镜设置隔离气囊,平台改装技术复杂,但具有较好的天顶观测能力。
为实现特定目标的天文观测,飞艇整体也作为转动平台,需进行一定角度的姿态和航向调整,使望远镜指向目标区间,结合望远镜的有限视场和跟踪功能,对目标进行干涉成像观测。
图6 10m基线2m口径红外干涉成像系统在艇身顶部内置的布设示意图
3.3.3 观测性能分析
当红外中心波长1.55 μm,10 m基线红外干涉测角精度也在0.15 urad量级,与口径10 m望远镜成像分辨率相当。当干涉相位测量误差小于2 πrad,在法线方向上,10 m基线红外的干涉测角精度即可优于0.15 urad;当干涉相位测量误差小于1 rad,其干涉测角精度可优于0.02 urad。
干涉成像分辨率方面,本文系统在4亿km处对应的俯仰和方位向的定位精度在9 km量级,该数值即对应干涉成像分辨率。火星距离地球距离在5500万公里到4亿km之间,显然该系统也可用于高分辨率红外成像火星探测。
探测灵敏度主要由望远镜口径即接收面积、信号光谱范围和探测器体制决定。10 m口径望远镜的接收面积为78.53 m2,本文3个2 m口径望远镜的接收面积为9.42 m2,两者接收面积差了8.33倍。
采用衍射光学系统,通过激光本振的波长调谐,其可有效接收的光谱范围约为0.1 μm,相比传统光学系统光谱范围1.1 ~ 2.4 μm,其接收红外信号能量减少约12倍。本文采用激光本振红外相干探测体制,由于相干探测的灵敏度比传统的直接探测至少要高20 dB即100倍,故本文系统的探测灵敏度应等效于10 m口径望远镜,可观测的极限星等约为22。
显然,本文艇载10 m基线2 m口径激光本振红外干涉成像系统在天文观测领域具有良好的应用前景。和“中国哈勃”空间站载2 m口径天文望远镜[30]相比,在技术实现方法和空间分辨率指标上具有特色。
3.4 关键技术分析
3.4.1 大口径轻量衍射光学系统
近年来衍射成像光学系统得到了快速发展,使用衍射光学系统易于形成大的接收口径,典型的如膜基透镜[20],其主镜通过衍射器件引入较大的相位变化量实现波前控制,可减小焦距并有利于系统的轻量化。这里的衍射器件相当于移相器,将接收的平面波转为同相球面波在焦点处实现聚焦。
膜基透镜和菲涅尔透镜阵列都属于衍射器件,从原理上讲,也可看做二元光学器件,其性能也可用微波相控阵天线理论和方法进行分析。大口径衍射光学系统直接制造难度较大,实际工作中需采用孔径拼接技术[31]。
和微波系统一样,光学系统聚焦所需的波前控制包括相位和时延两个方面,轻量膜基衍射光学系统仅能实现相位控制,其光谱范围较窄,适于激光雷达使用,文献[32],[33],[34]论述了衍射光学系统在激光SAR和激光雷达中的应用问题。用于红外波段时,由于没有时延控制为减少孔径渡越,在大口径条件下通常采用的焦距较长,即便采用色差校正技术[24],其工作的光谱范围和观测视场也很有限。为此,一方面针对轻量化要求需对相关系统参数优化设计,在压缩光路考虑引入像方摆扫镜扩大视场[35],另外一方面需研究分段式平面光电成像探测器(SPIDER)思路[36],该思路类似目前微波雷达的数字阵列天线,有可能同时解决相位和时延问题。
目前,我国的二元光学技术[37]和大口径薄膜主镜色差校正技术已有较好的技术基础。采用衍射光学系统,若能将望远镜的重量密度控制在20kg /m2,本文上述艇载激光和红外成像探测系统,就具有可行性,但达到该重量密度指标,并非易事,需要持续攻关。
3.4.2 激光本振红外探测器
近年来单光子探测技术得到快速发展,百万像素单光子阵列探测器已投入应用[38]。相比直接探测激光雷达,基于激光本振的相干探测激光雷达(如激光SAR[39])和激光通信技术近年也得到快速发展,本振信号的存在使目标微弱回波可实施光电转换为后续信号积累提供条件,其探测灵敏度已远优于1个光子。通常激光本振功率可设置得足够高(在mW量级),这使得接收端仅受限于量子噪声且容易实现窄带滤波,由此可获得较高的探测灵敏度,其灵敏度可比直接探测激光雷达高20 dB[40]。
分析表明,现有红外相机等效噪声功率比直接探测激光雷达要高出至少3个数量级。红外探测器是一个光电转换器件,其性能最终还是在电子学表征,有限的电子学带宽和严重的红外信号频谱混叠,是红外相机等效噪声功率高的主要原因。由于工作波段接近,为降低等效噪声功率提高红外相机探测性能,基于激光本振的探测技术很值得红外相机系统借鉴。假定以激光雷达等效噪声功率作为红外相机探测灵敏度参考,目前红外相机探测性能的改善,应还有很大空间。除了采用制冷型探测器,目前看来提升其探测灵敏度的另一个思路就是引入波长变化的激光本振信号,在实现红外信号宽谱段接收的同时,通过激光本振实现光谱细分并去除宽带红外信号的频谱混叠,红外回波和激光本振信号的耦合形式可参考激光相控阵结构[41]。
与此同时,激光本振设置后,激光作为载波不仅可保证两个望远镜红外信号相位的正确传递,而且可在电子学实施窄带滤波形成窄带红外信号有利于形成干涉成像,有望大幅提高现有望远镜的红外光谱干涉成像能力。
激光本振红外探测器概念的提出,对进一步提高非制冷红外相机探测性能和红外光谱干涉成像质量,均具有重要意义。
4、 结束语
根据上述分析,参照文献[42]体系,艇载光学载荷的发展,应重点突破大口径轻量衍射光学系统关键技术,首先发展红外目标成像探测系统,同时积极探索激光和红外共孔径,以及新型非制冷红外探测器问题。艇载微波载荷的发展,应重点突破共形轻量化天线关键技术,系统在总体设计上,应考虑成像探测一体化和主被动结合技术体制。在现阶段条件下,艇载无源探测系统的可行性较好。作为一种大口径天线的实现形式,基于子阵结构的稀疏阵列天线也具有竞争力。
随着工作不断深入,相信艇载成像探测系统技术会得到充分发展和广泛应用。
参考文献
[1] BarbierC, Delaure B, Lavie A. Strategic research agenda for high-altitude aircraft andairship remote sensing applications[C]. USE-HAAS workshop. Antwerp: 2006,XXXVI-1: 44–49
[2] TimClark,Esko Jaska.Million Element ISIS Array[C]. 2010 IEEE InternationalSymposium on Phased Array Systems and Technology (ARRAY), Boston,Massachusetts, USA, 2010: 29-36
[3] 董鹏曙,李宗亭,张朝伟.平流层飞艇载综合脉冲孔径雷达系统研究[J].雷达科学与技术, 2012,10(05):476-480
[4] 侯颖妮,李道京,尹建凤,等.基于稀疏综合孔径天线的艇载成像雷达研究[J].电子学报, 2008(12):2377-2382
[5] 侯颖妮,李道京,洪文.基于稀疏阵列和压缩感知理论的艇载雷达运动目标成像研究[J]. 自然科学进展, 2009,19(10): 1110–1116
[6] 滕秀敏,李道京.艇载共形稀疏阵列天线雷达成像研究[J].电波科学学报,2012,27(04): 644-649 656
[7] 李烈辰,李道京,黄平平.基于变换域稀疏压缩感知的艇载稀疏阵列天线雷达实孔径成像[J].雷达学报,2016,5(01):109-117
[8] 田鹤.频域稀疏雷达三维成像技术研究[D].中国科学院大学, 2018
[9] 马萌,李道京,李烈辰,等.正交长基线毫米波InISAR运动目标三维成像[J].红外与毫米波学报,2016,35(04):488-495
[10] 周建卫,李道京,田鹤,等.基于共形稀疏阵列的艇载外辐射源雷达性能分析[J].电子与信息学报.2017,39(5):1058-1063
[11] 周建卫,李道京,胡烜.单源三站外辐射源雷达目标探测性能[J].中国科学院大学学报,2017, 34(4):422-430
[12] 许斌,曲卫,何永华,唐晓婧.基于导航信号的空间目标无源探测系统性能研究[J].科技信息,2014(04):77-78
[13] 田卫明,曾涛,胡程.基于导航信号的BiSAR成像技术[J].雷达学报,2013,2(01):39-45
[14] 秦兆涛,王俊,魏少明,等.基于目标高度先验信息的多站时差无源定位方法[J].电子与信息学报,2018,40(09):2219-2226
[15] 赵攀峰,袁军行,成琴,等.雷达天线与柱形气囊共形设计与仿真分析[J].雷达科学与技术,2013,11(01):97-100
[16] 张轶江.充气背腔薄膜天线[J].山东工业技术,2018(15):144 136
[17] 国外空间薄膜天线发展与应用近况[EB/OL]. [2020-03-03].https://mp.weixin.qq.com
[18] 李道京,滕秀敏,潘舟浩.分布式位置和姿态测量系统的概念与应用方向,雷达学报[J], 2014,2(4):400-405
[19] 贺岩,胡善江,陈卫标,等.国产机载双频激光雷达探测技术研究进展[J].激光与光电子学进展,2018,55(08):7-17
[20] 焦建超,苏云,王保华,等.地球静止轨道膜基衍射光学成像系统的发展与应用[J].国际太空,2016(06):49-55
[21] 李道京,朱宇,胡烜,等.衍射光学系统的激光应用和稀疏成像分析[J].雷达学报,2020, 9(01):195-203
[22] 汪权东,陈卫标,陆雨田,等.机载海洋激光测深系统参量设计与最大探测深度能力分析[J].光学学报,2003(10):1255-1260
[23] 王鑫,潘华志,罗胜,等.机载激光雷达测深技术研究与进展[J].海洋测绘, 2019,39(05):78-82
[24] 任智斌,胡佳盛,唐洪浪,等.10m大口径薄膜衍射主镜的色差校正技术研究[J].光子学报, 2017,46(4):422004-0422004.
[25] 王兵学,张启衡,陈昌彬,等.凝视型红外搜索跟踪系统的作用距离模型[J].光电工程,2004, 031(007):8-11.
[26] 何飞,Remote sensing of planetary space environment[J].科学通报,65(14), 1305(2020)
[27] 李春来,张洪波,朱新颖.深空探测VLBI 技术综述及我国的现状和发展[J].宇航学报,2010, 31(8):1893-1899.
[28] EVNand Global VLBI results and images[EB/OL]. [2019-12-13]. http://old.evlbi.org/gallery/ images.html.
[29] 武向平.射电天文望远镜:FAST与SKA,[EB/OL].[2018-05-29].https://mp.weixin.qq.com
[30] 詹虎.“中国哈勃”诞生记|赛先生天文[EB/OL].[2020-07-30].https://mp.weixin.qq.com
[31] 刘骏鹏.薄膜衍射成像系统设计与分析[D].哈尔滨工业大学,2018.
[32] 胡烜,李道京.10m衍射口径天基合成孔径激光雷达系统,中国激光,2018,45(12):0510010
[33] 李道京,胡烜,周凯.基于共形衍射光学系统的SAL成像探测研究,光学学报[J], 2020,40(4): 0428001
[34] 朱进一,谢永军.采用衍射主镜的大口径激光雷达接收光学系统[J].红外与激光工程,2017, 46(5):518001-0518001 (8)
[35] 李刚,樊学武,邹刚毅,等.基于像方摆扫的空间红外双波段光学系统设计[J].红外与激光工程,2014,43(03):861-866
[36] 杜彦昌,刘韬.美国验证微透镜干涉光学成像技术应用可行性[EB/OL].[2017-09-19]. https://mp.weixin.qq.com
[37] 金国藩等.二元光学[M].北京:国防工业出版社,1998
[38] 殷飞.佳能开发出全球首款100万像素SPAD图像传感器,[EB/OL]. [2020-07-03]. https:// mp.weixin.qq.com
[39] BarberZ W,Dahl J R.Synthetic aperture ladar imaging demonstrations and information atvery low return levels[J].Applied optics,2014,53(24):5531-5537
[40] 王海.相干光通信零差BPSK系统的设计[D].电子科技大学
[41] Sun,Jie, et al. Large-scale nanophotonic phased array. Nature493.7431(2013):195-199
[42] 高端装备产业研究中心,美国侦察预警卫星体系浅析,[EB/OL].[2019-02-26].https:// mp. weixin.qq.com
,





免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。文章投诉邮箱:anhduc.ph@yahoo.com






