农业遥感研究现状与展望(机载遥感系统在精准农业中的应用c)
数十年来,遥感一直被用作精密农业的重要数据采集工具。基于其在地球上方的高度,遥感平台主要包括卫星,有人驾驶飞机,无人驾驶飞机系统(UAS)和地面车辆。尽管可以安装其他传感器(例如激光雷达),但这些平台上搭载的绝大多数传感器是成像传感器。近年来,卫星成像传感器的进步极大地缩小了基于飞机的传感器在空间,光谱和时间分辨率方面的差距。最近,UAS作为低成本遥感平台的可用性极大地填补了有人驾驶飞机与地面平台之间的空白。然而,有人驾驶飞机仍将是主要的遥感平台,并且比卫星或无人机系统具有某些优势。与无人机系统相比,载人飞机的飞行高度灵活,速度快,有效载荷容量大,飞行时间长,飞行限制少,耐候性强。本文的第一部分概述了遥感器的类型和三个主要的遥感平台(即卫星,有人驾驶飞机和UAS)。接下来的两个部分重点介绍了用于精密农业的有人机载机载成像系统,包括那些由安装在农机上的消费级相机组成的系统。审查了许多定制和商用机载成像系统,包括多光谱,高光谱和热像仪。第四部分提供了五个应用示例,以说明如何将不同类型的遥感影像用于实际的精准农业应用中的作物生长评估和作物病虫害管理。最后,简要讨论了将不同平台和成像系统用于精密农业的挑战和未来的努力。
1 遥感系统和平台的主要类型在过去的二十年中,已经开发并部署了许多商业和定制的机载和高分辨率卫星成像系统,用于包括精密农业在内的各种遥感应用。最近,无人飞行器系统(UAS)已经成为一种低成本,多功能的遥感平台。尽管本文重点介绍了用于精密农业的有人机载机载成像系统,但本节简要回顾了其他主要类型的遥感系统和平台。
1.1遥感器类型
遥感传感器,或简称为遥感器,旨在从传感器仪器的视野中的某个距离检测和测量反射和发射的电磁辐射。远程传感器可以分为非成像(例如,光谱辐射仪)和成像(例如,相机)。传统上,成像传感器是在绕地球运行的卫星和有人驾驶飞机上携带的,而非成像传感器和成像传感器都可以手持或安装在地面车辆上。最近,由于成本低,易于部署和飞行高度低,无人机系统已成为一种流行的遥感平台,填补了有人值守平台与地面平台之间的空白。
成像传感器(基于胶片的照相相机,光电传感器,无源微波,雷达)可以从垂直或最低点提供目标区域的视图。根据能源的不同,成像传感器可以分为无源和有源传感器。无源传感器检测反射的阳光或发出的热红外和微波能量,而以成像雷达为代表的有源传感器则向目标提供自己的能源,并记录目标反射的辐射。电光传感器是遥感中使用的主要无源传感器。这些无源传感器使用检测器将来自地面场景的反射和/或发射辐射转换为电信号,然后将其存储在磁,光和/或固态介质上。检测器的灵敏度设计成适合遥感中感兴趣的光谱间隔,包括近紫外(UV),可见到近红外(VNIR),短波红外(SWIR),中波红外(MWIR)和热敏区域红外或长波红外(LWIR)。电光探测器可以探测到的总波长范围从0.3到15μm[ 1 ]。在SWIR可见区域工作的传感器只能在阳光照射的条件下使用。相反,热传感器具有在有或没有阳光的情况下工作的能力。尽管也常使用热传感器,但绝大多数用于精确农业的远程传感器是具有VNIR灵敏度的电光传感器。
根据光谱带的数量和带宽,可以将成像传感器分为两类:多光谱和高光谱。多光谱成像传感器通常在3至12个光谱带中测量反射和/或发射的能量,尽管大多数多光谱成像系统在三个可见带(蓝色,绿色和红色)和一个近红外(NIR)波段中测量反射率。相反,高光谱成像传感器可测量整个电磁频谱中数十到数百个窄光谱带中的辐射。与来自多光谱传感器的图像相比,来自高光谱传感器的图像包含的光谱信息要多得多,因此有可能更精确地区分和量化地面物体和特征。
1.2遥感卫星
传统的遥感卫星诸如陆地卫星和SPOT系列已长期用于作物识别[ 2 ],产率估计[ 3,4 ]和害虫检测以上用于农业应用大的地理区域[ 2 ]。但是,由于这类图像的空间分辨率较粗糙且重新访问时间较长,因此在评估精准农业的田间作物生长条件方面用途有限。
高分辨率卫星传感器的最新进展已大大缩小了传统卫星图像和机载图像之间的空间分辨率差距。自从第一枚高分辨率商业遥感卫星IKONOS于1999年成功发射入轨道以来,已经发射了数十个空间分辨率为10m或更精细的此类卫星成像系统[ 3 ]。较短的重访时间和快速的数据传输,加上其较大的地面覆盖范围,使得高分辨率卫星图像对许多应用具有吸引力,尤其是对于需要高分辨率图像数据的精密农业。
随着许多国家和商业公司推出新的卫星传感器,卫星遥感技术正在迅速发展。目前,Planet Labs,Inc.(美国加利福尼亚州旧金山)运营着三个不同的地球成像星座,即PlanetScope,RapidEye和SkySat。PlanetScope由超过120颗卫星组成,以3m空间分辨率提供RGB(红色,绿色,蓝色)帧图像或具有一半RGB和一半NIR的分割帧图像。RapidEye有五颗卫星以6.5m的标称分辨率(重采样到5m)收集蓝色,绿色,红色,红色边缘和NIR波段的多光谱图像。具有14个卫星的星座的SkySat可以捕获1m个多光谱图像(蓝色,绿色,红色和NIR)和亚表全色图像。[ 4 ]。Yang [ 5 ]综述了两打以上的高分辨率卫星传感器及其在精密农业中的应用。
1.3载人飞机成像系统
机载成像系统传统上被称为载人飞机上携带的成像系统,因此从载人飞机获得的图像通常被称为机载或空中图像。载人飞机上使用的照相机或成像系统通常不受大小和重量的限制,它们需要由飞机上的飞行员或照相机操作员操作或触发。典型的多光谱或高光谱成像系统由一个或多个照相机,计算机和用于数据采集和实时可视化的监视器组成。
根据所使用的遥感器的类型,某些飞机在飞机底侧专门配备了摄像头孔或端口,用于安装不同的成像传感器。但是,很多时候,摄像机只是简单地安装在起落架上,或者通过简单的支架悬挂在车门上。有大量可用于遥感的商务和私人飞机。大多数用于遥感的飞机在低于平均海平面(MSL)约3000m的高度下飞行,不需要氧气罩或加压。此类中包括普通的固定翼螺旋桨驱动飞机,例如塞斯纳206、182或172。此类飞机的飞行价格便宜,并且在世界范围内得到广泛使用。
农用飞机是许多国家中使用的一类特殊的有人驾驶飞机。仅在美国,就有成千上万的农业飞机用于作物生产和保护材料。这些飞机可以配备成像系统,以监测农作物的生长状况,检测农作物的有害生物(杂草,病虫害)并评估地面和空中应用处理的性能和功效。这种额外的成像功能还将提高有人驾驶飞机的实用性,并帮助空中施药者通过遥感服务获得更多收益。
轻型运动飞机(LSA)是一类新兴的小型轻型飞机,易于飞行。不同国家/地区对LSA有各自的规范和规定。例如,在美国,可以将几组不同的飞机作为LSA进行飞行。美国联邦航空管理局(FAA)将LSA定义为满足某些要求的飞机,而不是直升机或动力电梯,其中包括最大起飞总重量600kg,最大失速83km / h和最大水平飞行时速220km / h等[ 6 ]。有关LSA及其许可和认证的更多详细信息,请访问FAA网站[ 7 ]。。LSA飞机作为一种灵活而经济的航空影像平台具有巨大的潜力。它们比其他载人飞机便宜,但没有UAS的许多限制。
当需要在低空悬停和飞行的能力时,可以将直升机用于低空成像。由于直升机的运营成本更高,因此UAS将是一种更为经济的选择。也有用于空中遥感的高空飞行有人驾驶飞机。此类飞机可以在更高的高度飞行(例如10,000m MSL),以较低的空间分辨率提供较大的区域覆盖范围。随着当今大范围覆盖的高分辨率卫星图像的广泛使用,高飞行器只能用于特殊任务。
1.4基于UAS的成像系统
UAS是一类在最近几年中越来越受欢迎的飞机。这些小型便携式飞机价格便宜,能够在有人驾驶飞机无法起飞和降落的地方起降。但是,基于UAS的相机和成像系统具有尺寸和重量限制,更重要的是,它们只能远程或自动触发。UAS上使用的许多相机或传感器与有人驾驶飞机上使用的相机或传感器相同或相似,尽管它们更紧凑且触发方式不同。
旋翼和固定翼无人机系统是当今使用的两种主要无人机系统。旋转式无人机系统可以垂直起降并悬停,但飞行时间短且速度慢。相比之下,固定翼UAS需要发射器(除非可以手动发射)起飞和跑道降落,但它可以以更快的速度飞行更长的时间。尽管如此,所有小型UAS在有效载荷,飞行时间,飞行范围和防风能力上都有局限性。即使某些UAS具有承载多个成像系统的能力,大多数小型UAS只能携带很小的有效载荷,从而限制了要使用的摄像机的类型。小型UAS由电池供电,电池的飞行时间通常为10-30分钟。UAS的飞行范围还限制了每次飞行可覆盖的半径。
然而,UAS可以以非常高的空间分辨率捕获图像,从而有可能在表型和精密农业上评估叶片和植物水平上的作物生长条件。在过去的几年中,基于UAS-遥感已越来越多地用于作物表型来估计植物生长参数,如苗密度[ 8 ],株高[ 9,10 ],叶面积指数[ 11 ],生物质[ 12,13 ]和产率[ 14,15,16 ]。像从载人飞机和卫星图像,基于UAS-图像已成为重要的数据源,以评估作物的健康和害虫的条件,例如水应力[ 17 ],杂草蔓延[ 18,19 ],疾病感染[ 20,21 ],营养状态[ 22 ]和虫害[ 23 ]。
尽管UAS的广泛使用和快速增长的普及性,但由于对空域的安全威胁,UAS仍然存在许多飞行限制。每个国家都有其与UAS操作有关的规则和规定。商业飞行员,特别是空中施药者和在低空空域操作的其他飞行员的安全问题需要得到解决。在美国,UAS飞行员必须遵循美国FAA制定的第107部分指南[ 24 ]。一些重要的操作限制包括:1)所有有效载荷的无人飞机的重量必须小于25kg;2)只能在视线范围内飞行;3)最高允许海拔是地面以上122m(AGL);4)最高时速为100mph(161km / h);5)在获得所需的空中交通管制许可的情况下,允许在B,C,D和E类空域中进行操作。操作小型UAS的人员必须持有远程飞行员执照,或者在经过认证的人员的直接监督下。还有许多其他限制,但是如果授予了豁免证书,则可以免除某些限制。
由于当前的航空法规及其自身的局限性,UAS已主要用于在研究区和相对较小的作物面积上进行图像采集。在将UAS的某些限制更改为商业应用之前,常规的有人驾驶飞机仍然是机载遥感的有效且通用的平台。尽管高分辨率卫星传感器继续缩小空间,光谱和时间分辨率的差距,但机载成像系统仍具有相对较低的成本,较高的空间分辨率,易于部署以及实时或接近的优势,因此仍比农场级别的卫星成像更具优势-图像的实时可用性。此外,由于卫星轨道的原因,无法始终在指定的时间获取所需目标区域的卫星图像,
有人驾驶飞机的图像通常称为机载或空中图像。为了与有人驾驶飞机的图像区分开来,UAS的图像称为UAS图像。因此,本文提到的机载成像和机载成像系统与有人驾驶飞机有关。在以下各节中,对许多机载多光谱和高光谱成像系统进行了回顾和描述。提供了应用示例,以说明机载多光谱和高光谱图像如何用于精确农业应用。讨论了在精确农业中选择和使用不同类型遥感影像的局限性和未来的努力。
2 机载多光谱成像系统机载多光谱成像系统已经被广泛地用于自1990年代以来精确农业由于它们的低成本,高分辨率,时效性,并通过传统的卫星传感器,以获得类似的光谱带数据的那些能力[ 25,26 ]。多光谱成像系统通常采用多个摄像机和光谱滤镜以实现多光谱波段。大多数系统使用三到四个具有VNIR灵敏度的相同相机来获取RGB和彩色红外(CIR)图像。例如,一个四波段成像系统由四个相同的照相机组成,这些照相机配备了四个不同的带通滤波器,以获得蓝色,绿色,红色和NIR波段。所使用的摄像机通常是工业摄像机,每个摄像机设计一个频段。但是,近年来,随着质量的提高和价格的下降,消费级相机已越来越多地用作遥感工具。消费级相机的主要优势在于,单个相机可以直接用于捕获RGB图像。此外,可以对其进行修改以捕获一个NIR波段或两个可见波段和一个NIR波段的组合。
2.1工业相机
20世纪90年代以来,许多空气传播的多光谱成像系统(AMIS)已被开发并用于各种的遥感应用,包括牧场和耕地评估,精密农业,和虫害管理[ 27,28,29,30 ]。最机载多谱成像系统可以在3-12窄的光谱带在光谱的可见光到近红外区域提供具有亚米级分辨率的图像数据[ 31,32,33,34 ]。
工业相机通常采用单色电荷耦合器件(CCD)传感器,尽管近年来互补金属氧化物半导体(CMOS)传感器因其低成本和低功耗而逐渐取代CCD传感器。多光谱系统中的每个摄像机通常都配备有不同的带通滤波器。这种方法的优势在于,可以针对最佳设置分别调整每个摄像机,但是各个波段图像需要配准或彼此对齐。另一种方法是使用分束棱镜和内置在单个摄像机中的多个传感器来实现多光谱成像。这样的系统就是CS-MS1920多光谱相机(Teledyne Optech,Inc.,加拿大安大略省旺市),它使用分束棱镜和三个CCD传感器来获取VNIR范围内3-5个光谱带中的图像。这种方法的优点是各个波段的图像在光学和机械上都是对齐的。
位于德克萨斯州大学城的USDA-ARS空中应用技术研究小组已经开发并评估了几种用于农业应用的机载成像系统。图1显示了四摄像机多光谱成像系统(左下)以及其他部分中介绍的其他三个成像系统(可以将四个成像系统安装在USDA-ARS Cessna 206的两个摄像机端口上以捕获图像)同时)。四相机系统由四台单色CCD相机和一台配有图像采集卡和图像采集软件的计算机组成[ 34 ]。摄像机在400-1000nm光谱范围内敏感,并提供2048×2048像素的12位图像。四个摄像机配备了四个带通干涉滤光片,其中心波长分别为450nm,550nm,650nm和830nm。所有滤光片的带宽为40nm。

图1 安装了四相机成像系统(左下方),高光谱相机(左上方),热像仪(右上方)以及两台USDA-拥有的消费
机载数据系统有限公司(美国明尼苏达州雷德伍德福尔斯)提供了几种机载多光谱成像系统。Spectra-View系统是一种多光谱系统,旨在容纳多达8个不同的摄像机,这些摄像机的大小,格式和波长从UV到LWIR。全球定位系统/惯性导航系统(GPS / INS)单元与该系统完全集成在一起,可提供精确,自动的图像地理定位。例如,Spectra-View 5WT系统可以获取六个波段的12位图像:蓝色(480-510nm),绿色(520-610nm),红色(620-730nm),NIR(770-970nm),MWIR(3 -5µm)和LWIR(8-14µm)。四个VNIR图像的像素为4872×3248,而MWIR和LWIR图像的像素为640×512。Spectra-View 9W以9000×4872像素的蓝色,绿色,红色和NIR波段以及全色波段(400-1000nm)。低成本的Agri-View系统旨在提供与Spectra-View 5WT相同的绿色,红色和NIR波段。所有系统都集成了专有的飞行前,任务计划和图像处理软件[ 35 ]。
Tetracam公司(美国加利福尼亚州查茨沃思)提供两个产品系列的多光谱成像系统。农业数码相机(ADC)系列中的每个系统都由一台相机组成,该相机配备有固定的滤光片,分别位于绿色,红色和近红外波长。ADC,ADC Lite和ADC Micro系统提供2048×1536像素的8位或10位图像,而ADC Snap捕获1280×1024像素的图像。多摄像机阵列(MCA)系列中的系统包含四个,六个或十二个注册并同步的摄像机,以同时捕获VNIR波长下用户指定的波段图像。MCA系统提供标准的Micro-MCA和Micro-MCA Snap版本。
Tetracam的RGB 3系统基于Micro-MCA4架构,由一台RGB相机和三台单色相机组成,它们分别感应以680nm,700nm和800nm为中心的三个窄带。Tetracam的Micro-MCA系统还可以配置一个或两个FLIR TAU热传感器(FLIR Systems,Inc.,美国新罕布什尔州纳舒厄),用于在7.5-13μm光谱范围内成像。金刚鹦鹉(MCAW:无线多摄像机阵列)是MCA系列的最新变体,包含六个具有单独过滤功能的1280×1024全局快动快门传感器。Tetracam的所有相机均轻巧紧凑,可进行手动,自动定时或远程触发的曝光。所有图像都存储在存储卡中(金刚鹦鹉除外),并且可以连续捕获GPS坐标以对图像进行地理标记。Tetracam的PixelWrench2软件用于管理和编辑图像。
除了前面提到的CS-MS1920多光谱相机外,Teledyne Optech还提供了数款中型RGB相机和热像仪,这些相机既可以独立使用,也可以与激光雷达(光检测和测距)系统集成在一起。例如,与Orion M300激光雷达集成的RGB CS-10000照相机和CS-LW640红外热像仪允许获取彩色和热成像以及3D表面数据的数据。CS-10000具有10,320 x 7,760像素,可提供图像以进行详细的特征可视化。CS-LW640基于未冷却的微辐射热计传感器,分辨率为640×480像素。与Orion C激光雷达传感器平台集成后,它是用于以3D映射热特征的强大工具[ 36 ]。
FLIR热像仪有许多系列,它们的传感器阵列最大可达1280×1024像素,在1-5μm,3-5μm和7.5-13μm的典型光谱范围内。USDA-ARS在大学城拥有的FLIR SC660摄像机(图1)敏感度在7.5至13μm之间,可测量–40°C至1500°C的温度。它捕获640×480像素的14位热图像。带有未冷却微辐射热检测器的FLIR T600系列摄像机可在7.5-13μm的像素范围内显示640×480像素的14位图像。SC8000系列摄像机具有冷却的锑化铟(InSb)检测器和1.5-5μm或3-5μm的高空间分辨率(1024×1024或1344×784像素)[ 37 ]。
ITRES Research Ltd.(加拿大艾伯塔省卡尔加里)提供TABI-1800热像仪,它是宽带热像仪,由于其搅拌循环冷却的MCT(碲化汞镉)检测器而具有出色的灵敏度,使用户能够分辨出低至与基于测辐射热计的系统相比,它的精度降低了十分之一,同时减少了热漂移。它可以在3.7-4.8μm的光谱范围内以1800个像素(业界最宽的阵列)捕获14位宽带图像[ 38 ]。
第一阶段工业(丹麦哥本哈根)提供高端航空影像产品。第一阶段150MP 4波段航空系统包括两个并排安装在板上的同步150百万像素(150MP)iXM-RS150F摄像机(RGB和消色差),Somag CSM40模块化稳定器,Applanix GPS /惯性测量单元( IMU),iX Controller计算机和iX Capture软件。每个摄像机具有14204×10652像素的像素阵列。该软件在RGB和NIR图像之间执行像素对齐,并且可以以Tiff格式生成以下图像乘积:RGB,NIR,4波段复合(RGBN),3波段CIR(NRG)。另一个类似的配置是带有两个100MP iXM-RS100F摄像机的第一阶段100MP 4频段航拍系统。
2.2消费级相机
随着成像传感器技术的进步,消费级相机已成为机载遥感的有吸引力的工具。与工业相机相比,此类相机价格便宜,易于使用,并且无需连接到PC即可进行数据采集。消费级相机含有要么装有拜耳滤色器,以获得使用一个单个的传感器的真彩色RGB图像的CCD或CMOS传感器[ 39,40 ]。拜耳滤色镜马赛克是用于将RGB滤色镜排列在传感器像素阵列上的滤色镜阵列。拜耳滤镜模式将50%的像素分配给绿色,将25%的像素分配给红色,将25%的像素分配给蓝色。对每个像素进行过滤以仅记录三种原色中的一种,并且使用各种去马赛克算法对每个像素内插红色,绿色和蓝色值。尽管像素插值降低了每个波段图像的有效空间分辨率,但三个波段图像却完美对齐。消费级的数码相机已被越来越多地用于研究人员在两个载人[ 41,42 ]和无人驾驶[ 43,44 ]飞机用于农业应用。
仅消费级相机的RGB图像就可用于许多农业应用。许多植被指数(VIS)从RGB图像导出已用于作物评估[ 11,21 ]。然而,大多数VI,包括最常用的归一化植被指数(NDVI),都需要NIR波段中的光谱信息。由于大多数消费级相机都装有滤光片以阻挡紫外线和红外光,因此可以在CCD或CMOS传感器前面将滤光片替换为长通NIR滤光片以获得NIR图像。
有几家公司提供红外摄像机转换服务,其中包括Life Pixel Infrared(美国华盛顿州马基尔特奥)和LDP LLC(美国新泽西州卡尔施塔特)。NIR阻挡滤光片通常由720nm或830nm长通滤光片代替。由于拜耳滤波器马赛克融合到传感器基板上,因此三个拜耳RGB通道的透射曲线与更换的长通NIR滤波器保持相同。但是,转换后的相机中的所有三个通道仅记录NIR辐射。尽管三个通道中的任何一个都可以用作NIR通道,但红色通道通常比其他两个通道具有更高的光强度。对使用近红外转换的数码相机的研究表明,此类相机与标准RGB相机结合使用,可以用作简单而经济的植物压力检测工具和作物监测[ 41,42 ]。
研究和实际应用都需要廉价,用户友好的成像系统,该系统能够使用有人和无人飞机捕获不同高度的图像。在过去的几年中,位于德克萨斯州大学城的USDA-ARS南部平原农业研究中心开发了几种基于消费级相机的单相机和双相机成像系统,可用于任何传统飞机或农用飞机[ 42,43,44 ]。农用飞机在美国被广泛用于农作物生产和保护材料。美国有成千上万的此类飞机,它们很容易作为机载遥感的多功能平台使用。如果配备了适当的成像系统,这些飞机可用于获取机载图像,以监测农作物生长状况,检测农作物有害生物(即杂草,病虫害),并评估空中应用治疗的性能和功效。这种额外的成像能力将增加这些飞机的实用性,并帮助空中施药者从遥感服务中获得更多收入[ 45 ]。
原始的USDA-ARS单相机成像系统由尼康D90数码CMOS相机和尼康AF尼克尔24mm f / 2.8D镜头(Nikon Inc.,梅尔维尔,纽约,美国)组成,可捕获4288×2848像素的RGB图像。 ,尼康GP-1A GPS接收器(美国纽约州梅尔维尔的尼康公司)对图像进行地理标记,以及Vello FreeWave无线遥控快门释放器(美国纽约州纽约的Gradus Group LLC)触发相机。选择的固定焦距(24mm)与相机传感器区域的宽度(23.6mm×15.8mm)相似,以使地面距离中的图像宽度与飞行高度大致相同,图像高度约为2/3飞行高度 例如,当以1000m AGL采集图像时,图像将覆盖大约1000m×667m的地面区域。由于尼康D90相机停产,它已被具有相同传感器区域但具有6000×4000像素阵列的尼康D7100取代。一个新的hähnelCaptur定时器套件(位于爱尔兰科克,班顿的hähnelIndustries Ltd.)在连续拍摄之间的指定时间间隔内远程触发相机。
通过添加经NIR修改的Nikon D7100相机组装了双相机系统。为了同时触发两台摄像机,每个摄像机都连接了一个hähnelCaptur远程接收器,并使用一个单独的hähnelCaptur远程发射器来启动/停止图像采集。每个相机都装有一个Nikon GP-1A GPS接收器,用于地理标记。这两个摄像机可以通过摄像机安装架连接到飞机上,而对飞机的改动很小或没有改动。单相机系统和双相机系统都已连接到空中拖拉机402B(图2)和几个固定翼飞机(即塞斯纳206、182和172)。这些系统已经评估了作物害虫检测和作物类型识别[ 41,44 ]。

图2 在得克萨斯州大学城的USDA-ARS空中应用技术研究室开发的两摄像机成像系统通过摄像机支架(黄色框)连
在得克萨斯州大学城的USDA-ARS上还组装了另外两个具有大传感器尺寸的系统。一个系统包括两个佳能EOS 5D Mark III数码相机具有5760×3840像素阵列(佳能(美国)公司,成功湖,纽约,美国),如图图1。另一台包括两台尼康D810数码相机,它们具有7360×4912像素阵列。这两个成像系统具有相同的传感器尺寸(36mm×24mm)和焦距(20mm)。在飞行高度为1000m AGL的情况下,图像覆盖1800m×1200m的地面区域,佳能系统像素大小为31cm,尼康系统像素大小为24cm。两台相机的每个系统的成本约为6,500美元。二照相机系统也被评价为精密农业应用[ 41,44,46,47 ]。
随着对修改相机的需求的增加,一些公司提供了修改后的消费级相机,以用一个摄像机捕获蓝绿色NIR或绿色红色NIR(即CIR)图像。例如,Life Pixel Infrared使用具有高带内传输功能的所谓NDVI滤镜将RGB摄像机转换为捕获蓝色,绿色和NIR光。LDP LLC提供修改服务,以将RGB摄像机转换为蓝绿色NIR 680-800nm或绿色红色NIR 800-900nm(CIR)摄像机。此外,可以将两种类型的修改后的摄像机捆绑在一起,以同时捕获五波段图像。与不受可见光影响的改进型近红外摄像机相比,改进后的蓝绿色近红外或绿色红色近红外摄像机可能存在光污染问题,具体取决于用于实现波段分离的滤波器和算法[48 ]。尽管修改后的相机具有其优势和潜力,可用于遥感应用,但仍需要进行更多的研究以改进修改方法并评估修改后的相机的性能。
3个机载高光谱成像传感器高光谱成像传感器(也称为成像光谱仪)是电光传感器(新一代电光传感器:高光谱成像传感器或成像光谱仪),可以在可见光中收集数十至数百个非常窄的连续光谱带中的图像数据到光谱的热红外区域。自1980年代后期以来,已开发出许多商用机载高光谱传感器(AVIRIS,CASI,HYDICE,HyMap,AISA,HySpex),并用于各种遥感应用。在本节中,讨论了几种常用的机载高光谱成像系统。
由加利福尼亚州帕萨迪纳市的喷气推进实验室(JPL)开发的机载可见/红外成像光谱仪(AVIRIS)[ 42 ]是第一款能够在400至2500nm光谱中的224个光谱带中提供12位图像的高光谱成像传感器。范围。AVIRIS仪器包含四个检测器,分别覆盖400-700nm,700-1300nm,1300-1900nm和1900-2500nm的光谱范围。当以730 km / h的MSL速度飞行20 km时,AVIRIS会收集像素大小为20 m,地带为11 km的图像。以130 km / h的4 km MSL采集图像时,像素大小为4 m,幅值为2 km。Green等。[ 49 ]提供了有关AVIRIS的出色概述,以及有关传感器使用的科学研究和应用实例。AVIRIS不断进行升级和改进,以满足研究和应用程序的需求。
Hymap是由Integrated Spectronics Pty Ltd(澳大利亚悉尼)开发和制造的机载高光谱成像传感器。自1996年以来,HyMap机载高光谱扫描仪已在北美,欧洲,非洲和大洋洲的许多国家/地区部署。最初的HyMap传感器在550-2500nm范围内具有96个通道,主要设计用于矿物勘探[ 50 ]。由HyVista Corporation Pty Ltd(澳大利亚悉尼)运营的当前HyMap传感器可在450-2500nm光谱范围内提供128个波段。该系统可适用于具有标准摄像头端口的任何飞机。差分GPS和IMU用于地理定位和图像地理编码。传感器可以配置为以3-10m空间分辨率捕获512像素宽的图像,以用于不同的应用[ 46,47,48,51 ]。
紧凑型机载光谱成像仪(CASI)由ITRES Research Ltd.(加拿大艾伯塔省卡尔加里)于1989年首次推出,是最早的可编程图像光谱仪之一。它允许用户对传感器进行编程,以收集针对不同应用的特定频段和带宽的高光谱数据。当前,ITRES提供了一套从可见光到热光谱范围的机载高光谱传感器。CASI-1500H在380-1050nm光谱范围内具有1500个跨轨像素,可捕获多达288个波段的14位高光谱图像。它具有紧凑的设计,带有嵌入式控制器和集成的GPS / IMU。SASI-1000A可在950-2450nm的200个波段上提供1000像素宽的图像,从而与CASI-1500H一起实现无缝的VNIR-SWIR覆盖。MASI-600,第一个市售的MWIR机载高光谱传感器可在3-5µm光谱范围内的64个波段上提供600像素宽的图像,而TASI-600可以在8-11.5µm范围内的32个波段上以相同的条带捕获高光谱热图像。ITRES还为UAS提供了较小版本的传感器。
SPECIM,Spectral Imaging Ltd(芬兰奥卢)提供了一系列机载高光谱成像系统(AISA机载高光谱传感器系列:AisaEAGLE,AisaEAGLET,AisaHAWK,AisaDUAL,AisaOWL),包括400-1000nm的AisaKESTREL 10、600-600nm的AisaKESTREL 16 1640nm,380-2500nm的AisaFENIX和AisaFENIX 1K,以及7.7-12.3µm的AisaOWL。AisaFENIX传感器可以在多达348个VNIR波段和274个SWIR波段上捕获384个像素的图像,而AisaFENIX 1K传感器可以在多达348个VNIR波段和256个SWIR波段上捕获1024个像素的图像。AisaOWL可以在96个频段上以384像素的条带获得热图像。AisaKESTREL 10和AisaKESTREL 16也可以与UAS配合使用,以分别捕获2040和640像素的高光谱图像。所有传感器都集成了GPS / INS单元[ 51 ]。
Headwall Photonics,Inc.(美国马萨诸塞州菲奇堡)提供了一套涵盖250至2500nm光谱范围的高光谱成像传感器。单独的传感器可用于紫外到可见光(250-500nm),VNIR(380-1000nm),NIR(900-1700nm)和SWIR(950-2500nm)光谱范围。它还提供了一个共同注册的VNIR-SWIR成像传感器,覆盖范围为400至2500nm。位于德克萨斯州大学城的USDA-ARS的高光谱成像系统由Headwall HyperSpec VNIR E系列成像光谱仪(图1的左上方),集成的GPS / IMU和高光谱数据处理单元组成。该光谱仪可以捕获1600像素宽的16位图像,在380至1000nm范围内的多达923个波段上。在1000m AGL时,高光谱摄像机覆盖615m范围,像素大小为38cm[ 52 ]。
4 机载图像应用示例机载多光谱图像已被广泛用于精密农业用于评估土壤性质[ 52,53 ],映射作物生长和产量的变化[ 54,55,56 ],和检测水应力[ 57 ],杂草侵染[ 58 ],作物昆虫损伤[ 59 ],和疾病的感染[ 30,53,60 ]。Moran等。[ 27 ]回顾了基于图像的遥感为精确农业应用提供时空数据的潜力。最近,Mulla [ 61 ]回顾了精密农业中遥感技术的关键进展并确定了知识差距。机载高光谱图像已经用于评估土壤肥力,估计作物生物物理参数被评估[ 62 ],映射作物产量变性[ 63,64 ],并检测农作物病虫害[ 65,66,67,68 ]。在本节中,将基于作者及其合作者的工作提供五个应用示例,以说明如何将多光谱和高光谱图像用于实际的精准农业应用中的作物生长评估和作物病害管理。
4.1用于创建管理区域和产量图的彩色红外图像
确定管理区域是针对精准农业中农业投入物(即养分,水和农药)的特定地点应用的重要第一步。除了土壤采样和产量测绘,遥感还为在田间建立管理区提供了另一种选择。Yang和Anderson [ 69 ]演示了如何使用机载多光谱图像来描绘野外管理区域并绘制产量变化图。他们采用了Everitt等人描述的机载三摄像机成像系统。[ 31 ]用于图像采集。该系统由三台CCD相机组成,分别装有绿色滤光片(555-565nm),红色滤光片(625-635nm)和NIR滤光片(845-857nm)。将来自三个摄像机的绿色,红色和NIR信号数字化并合并,以生成640×480像素的8位CIR复合图像。
图3(a)显示了德克萨斯州南部6hm 2谷物高粱田的CIR图像。以1300m的姿态获取图像,像素大小为1.4m。在CIR图像上,健康植物的颜色偏红,而褪绿植物和土壤暴露量较大的区域则偏白和偏灰。使用无监督分类技术将CIR图像分为四个光谱区域(图3)。(b))。由于高海拔地区,蓝色区域代表缺水地区。红色区域表示由于铁缺乏而导致植物严重缺绿的区域。其他两个区域(青色和绿色)代表了具有土壤和环境因素共同作用的生长变异性的区域。将图像数据分类为离散区域的优点是减少了每个区域内的方差。这些区域可用作指导植物和土壤采样以及其他精确农业操作的管理区域。使用分层随机采样方法来生成有限数量的采样点,以识别该字段变化的原因(图3(b))。

图3 德克萨斯州南部6hm 2谷物高粱田的机载图像和地图(改编自[69])
相关分析表明,籽粒产量与NDVI显着相关(r = 0.95)。这种强相关性的含义是,可以基于产量和NDVI之间的回归方程从图像生成谷物产量图(图3)。(C))。与CIR图像和分类图相比,良率图具有相似的空间模式,但揭示了区域内的更多变化。该示例说明了机载多光谱图像如何与GPS,地理信息系统(GIS),地面采样和图像处理技术结合使用,以识别管理区域并绘制田间产量变化。无监督分类有效地将图像分类为具有不同生长条件和生产水平的光谱区域。多光谱影像也已被证明有助于建模产生空间变异性。
4.2绘制棉花根腐病的四波段图像
棉花根腐病是由土生真菌Phymatotrichopsis omnivora引起的,是一种破坏性疾病,已经影响了整个棉花行业长达一个多世纪。从受侵染的田间拍摄的历史航空图像已经证明,这种疾病倾向于年复一年在田间的同一大片区域中发生[ 30 ]。独特的空间特性使棉花根腐病成为进行特定地点管理的极佳候选者。
图4(a)显示了用图1中所示的四相机系统从德克萨斯州圣安吉洛附近的11hm 2棉田中捕获的CIR图像。在图4(b)中还示出了相应的两区域分类图和两区域处方图。与未感染的植物带红色调相比,根腐病感染的植物在CIR图像上具有深灰色。两区分类显示,大约37%的田地受到了侵扰。将5m缓冲区添加到分类图上的感染区域,以将处方图上的治疗区域增加到63%(图4)。(C))。缓冲液有效地消除了疫区之间小的非疫区,这不仅适应了疾病的潜在蔓延,而且使大型农机在特定地点的应用更加实用。

图4 德克萨斯州圣安吉洛附近一个11hm 2的棉田播有棉根腐烂的航空图像和地图。处方图中的绿色区域已用杀菌
可变速率控制系统适用于现有的拖拉机和播种机系统,以便在种植时将杀真菌剂应用于田间。系统将期望的比率应用于规定的区域,误差为1.5%。处理后的航空图像显示,该杀菌剂有效地控制了受灾地区的棉花根腐病。简单的经济分析表明,如果可以将治疗面积减少40hm 2,则杀真菌剂使用的节省可以抵消对可变速率控制器的最初投资。对于某些大田地,单个田地中治疗面积的减少可能超过该数目。因此,通过对该疾病的特定部位管理,存在巨大的节省潜力。
4.3用于绘制作物产量变化的高光谱图像
与多光谱成像相比,高光谱成像具有更好的光谱分辨率,因此有可能提供更好的生物物理参数估计。Yang等[ 71 ]。评估了机载高光谱图像,以绘制与产量监测器数据相比的作物产量变化。Yang等人描述的机载高光谱成像系统。[ 72 ]用于从14hm 2采集图像得克萨斯州南部的谷物高粱田。该系统配置为在450至920nm光谱范围内的128个波段上捕获640个像素的12位图像。去除较低和较高波长的噪声带后,将剩余的102个波长从475至845nm的频带用于分析。使用安装在收获物上的Yield Monitor 2000系统(Ag Leader Technology,艾姆斯,爱荷华州,美国)从田间收集产量数据。
图5显示了由该场的高光谱图像合成的RGB彩色图像。该图像是在农作物的峰值植物发育期间拍摄的。田地东北部的浅灰色主要是由于稀疏的植物覆盖在非常沙质的土壤上。相关分析表明,籽粒产量与可见带显着负相关,与近红外带正相关,相关系数范围为-0.80至0.84。主成分分析应用于图像以消除数据冗余。基于前十个主成分的逐步回归分析表明,十个主成分中的五个是显着的,并解释了产量的80%变异性。要确定重要的乐队,直接对产量数据和102波段高光谱图像数据进行逐步回归。七个波段(481、543、713、731、735、771和818nm)被认为是重要的,并解释了约82%的产量变异。图5显示了从产量监控器数据和图像中的七个重要波段生成的产量图。两个产量图上的空间模式相似,表明可以根据生长季节高峰期附近获取的机载高光谱图像估算谷物产量。

图5 RGB彩色图像和由产量监控器数据生成的,基于14hm 2谷物高粱田的102波段高光谱图像中的七个重要波段的
4.4使用消费级相机监控作物
如第2.2节所述,消费级相机也可以像示例4.1和4.2中的工业相机一样用于获取RGB和NIR图像。根据相机和飞行高度的不同,单个图像可以覆盖一个区域的一部分,整个区域,多个区域甚至整个农场。例如,在300m AGL时,尼康D90相机可以覆盖300m×200m或6hm 2的地面区域,像素大小为8.6cm。在3000m AGL下,同一台摄像机可以覆盖3000m×2000m或600hm 2的区域,像素大小为86cm。显然,如果飞行高度增加到初始高度的10倍,则地面覆盖率将增加到初始覆盖率的100倍,像素大小是初始值的10倍。
如果单个图像不能以所需的像素大小覆盖关注区域,则可以沿着多条飞行路线拍摄多幅图像。例如,要绘制得克萨斯州大学城附近的6.4km×12.8km(8190hm 2)的耕地面积(图6中的红色框),将由两个尼康D90相机组成的双相机系统安装在Air Tractor 402B农用拖拉机上飞机。相机以1500m AGL的速度沿11条相距600m的飞行线飞行(图6中的黄线))。以220 km / h的地面速度和6s的成像间隔,总共获取了360对带有地理标记的RGB和NIR图像,其侧面重叠为60%,向前重叠为62%。飞行整个成像区域大约花费了55分钟。然后使用Pix4Dmapper软件(瑞士洛桑的Pix4D SA)对图像进行镶嵌,然后创建一对正交RGB和NIR图像以及3D数字表面模型。
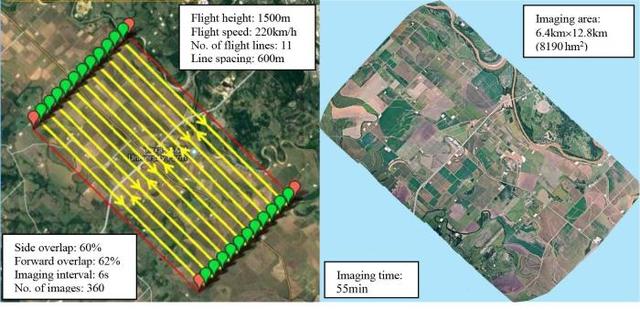
图6: 使用一对RGB和NIR消费级相机拍摄图像的飞行线(左),以及德克萨斯州大学城附近一个种植区域的镶嵌
如果将相同的双摄像头系统安装在以FAA允许的最大飞行高度(400英尺或122m)飞行的UAS上,则每个图像将仅覆盖像素大小为122 * 81.3m 2(1hm 2)的地面区域2.8厘米 成像8190hm 2与载人飞机相同的侧面和前向重叠区域,将使用我们的AG-V6A六翼直升机(HSE LLC,美国科罗拉多州丹佛市),其最大地面速度为10m / s,连续飞行约62小时完成144行,可产生约56,800张图像。由于用于UAS的电池只能使用15分钟左右,因此需要多个电池。由于频繁更换电池并需要额外的起飞和降落时间,因此实际飞行时间会更长,更不用说天气因素了。而且,拼接大量图像将需要几天甚至几天的时间。显然,如果需要在相对较小的区域进行高分辨率成像,则基于UAS的成像将更为合适。即使更快的飞行速度和更长的电池续航时间,
来自载人飞机的镶嵌RGB和NIR图像被堆叠为多光谱图像,从中可以导出各种VI(例如NDVI)进行作物监测。例如,Zhang等。[ 17 ]使用镶嵌的多光谱图像来识别作物类型并估计作物叶面积指数(LAI)。该图像的其他用途包括用于肥料的田间变异性评估以及用于棉花,作物病害检测和其他精准农业应用的植物生长调节剂。
4.5用于特定地点的空中除草剂的多光谱成像
可变速率或精密空中施用开始受到关注在21世纪初,当可变速率喷涂系统变得可用于农业飞机[ 73,74 ]。近年来,越来越多的空中喷枪认为他们需要在运营中采用遥感和可变速率喷油等新技术来保持竞争力。为了满足对作物生产和保护材料在特定地点进行空中应用的实用方法的需求,Yang和Martin [ 58 ]演示了如何集成机载多光谱成像系统和可变速率的空中应用系统,以针对冬季杂草henbit进行特定位置的管理。该成像系统由两台消费级相机组成,用于从德克萨斯大学学院附近休耕地的小块虫害侵染场中获取RGB和NIR图像。根据图像创建了一张处方图,仅将草甘膦除草剂应用于受灾地区。
图7所示为CIR图像,其中有虫侵染和从NDVI分类图导出的处方图,并在受感染区域添加了5m缓冲区。估计有缓冲液的鸡感染面积为56.4hm 2或总面积(124hm 2的 45.5%)。)。安装在Air Tractor AT-402B农用飞机上的Air IntelliStar可变速率系统(Satloc,Hiawatha,堪萨斯州)用于根据处方图在田间施用草甘膦。除草剂施用后两周收集的施用地图和图像用于评估特定地点施用的性能。空间和统计分析结果表明,该成像系统对于制止虫侵害和评估特定地点除草剂的使用效果是有效的,可变速率系统可将所需速率的产品准确地递送到指定区域,以有效地控制除草剂的使用。杂草。
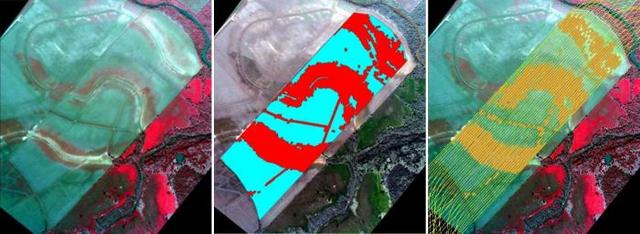
图7 德克萨斯州大学城附近124hm 2休耕地被杂草hen 杂草侵扰的休耕地的图像(改编自[68]) (a)机载彩色
5 挑战与未来的努力如今,各种遥感平台和成像系统的可用性给遥感从业者和用户带来了巨大的机遇和巨大的挑战。尽管本文的重点是基于有人飞机的机载成像系统,但也讨论了其他两种主要平台(即卫星和UAS)并将其与有人飞机进行比较。在精密农业中使用遥感面临许多挑战。一些挑战包括平台选择,要收集的图像类型,图像获取和交付,图像转换为最终产品以及图像产品的实际使用。
为了选择合适的平台和/或成像系统,对于特定应用,需要考虑各种因素(例如,区域的大小,图像类型和分辨率要求以及时间和成本约束)。通常,如果在较小区域中需要非常高分辨率的图像,则UAS将更为合适。对于大片区域或农场一级的成像,有人机会更有效。但是,如果没有有人驾驶飞机,则卫星图像将是一个不错的选择,因为它可以以相对较高的空间分辨率覆盖较大的区域。尽管农民知道机载和卫星图像的可用性,但大多数人不清楚要选择哪种图像以及如何订购。因此,
常见的图像类型包括多光谱(RGB,NIR和红边),高光谱和热成像。对于大多数精密农业应用,虽然某些情况下仅使用RGB图像就足够了,但RGB和NIR图像是必需的。由于很少有卫星高光谱传感器,目前有人驾驶飞机和UAS提供高光谱图像。仅当RGB和NIR图像不能满足要求时才需要高光谱和热图像。何时收集图像是另一个问题。根据目的(例如营养评估,水状况,害虫检测和产量估算),最佳图像获取日期会有所不同。需要更多的研究来确定不同应用的最佳时期。
及时获取和交付图像非常重要。当前大多数卫星的重访时间为1-5天,实际的图像获取时间取决于当地的天气情况以及与相似地理区域中其他客户的竞争。由于大多数高分辨率卫星的覆盖范围相对较窄,因此可以将这些传感器倾斜一定角度,以在沿路径的任务区域上拍摄最低点图像。随着更多卫星传感器的推出,客户可以从公司拥有的多个卫星传感器订购图像,以增加及时成像的机会。完整的PlanetScope星座最终将能够每天对整个地球进行成像。
如何将图像转换为可用的地图和信息是最大的挑战之一。尽管有许多图像处理技术可用于将图像转换为分类图和植被指数图,但将这些图转换为用于可变速率应用的处方图并不总是容易的。相同的NDVI图可能显示出土壤,产量和病虫害的差异。图像处理软件具有不同的功能,复杂性和价格。大多数种植者可能没有技能和时间来处理图像数据。图像处理是一个专业领域,需要高级计算机技能和对所涉及技术的基本了解。如果这对某些种植者不切实际,他们可以随时使用商业图像处理服务来创建相关地图。
作者:杨称嗨
來源:智慧农业
,
免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。文章投诉邮箱:anhduc.ph@yahoo.com