python3.8.2装不上matplotlib(手把手教你使用Numpy)
导读:用Python设计控制系统,你会用到接下来要介绍的几个模块:Numpy、Matplotlib、Scipy、Sympy和Python-Control。
作者:南裕树(Yuki Minami)
来源:华章科技

Numpy是用于数值计算的基础包。
使用Numpy可以高速高效地进行各种数值计算、统计处理以及信号处理。
import numpy as np
加载Numpy模块后,就可以使用平方根(np.sqrt)、绝对值(np.abs)、三角函数(np.sin、np.cos、np.arcsin、np.arccos)、指数(np.exp)、对数(np.log、np.log10)、四舍五入(np.round)等基本的数值计算用的函数了。
此外,弧度(rad)和角度(deg)换算的函数np.rad2deg也包括在内,还可以使用圆周率(np.pi)。
复数通过在虚部后面添加j来表示。可以使用np.imag来取出虚部。同样,可以使用np.real来取出实部,用np.conj来求得共轭复数。
还可以进行向量和矩阵运算。可以使用np.array来定义向量和矩阵。
A = np.array([ [1, 2], [-3, 4]])
print(A)
[[ 1 2]
[-3 4]]
可以使用T方法来求得转置矩阵。
print(A.T)
[[ 1 -3]
[ 2 4]]
可以使用np.linalg.inv来求得逆矩阵。
B = np.linalg.inv(A)
print(B)
[[ 0.4 -0.2]
[ 0.3 0.1]]
可以像下面这样进一步求得矩阵对应的行列式的值、矩阵的秩、特征值以及范数。
np.linalg.det(A) #行列式
10.000000000000002
np.linalg.matrix_rank(A) #秩
2
w, v = np.linalg.eig(A) #特征值和特征向量
print('eigenvalue=',w)
print('eigenvector=\n',v)
eigenvalue= [2.5 1.93649167j 2.5-1.93649167j]
eigenvector=
[[0.38729833-0.5j 0.38729833 0.5j]
[0.77459667 0.j 0.77459667-0.j ]]
x = np.array([1, 2])
print(x)
np.linalg.norm(x)
2.23606797749979
此外,还可以使用np.arange构建数列。
Td = np.arange(0, 10, 1)
print(Td)
[0 1 2 3 4 5 6 7 8 9]
上例中构建了一个从0开始到10(不包含)为止,且间隔为1的数列。
02 MatplotlibMatplotlib用于图形描绘,可以用它制作各种类型的图形和动画。绘图的具体例子可以参考它的主页:
http://matplotlib.org/gallery.html
可以像下面这样加载Matplotlib模块。
import matplotlib.pyplot as plt
让我们来看一个绘图的例子(见代码段2.1)。
- 代码段2.1 绘图
import numpy as np
import matplotlib.pyplot as plt
x = np.arange(0, 4 * np.pi, 0.1)
y = np.sin(x)
plt.plot(x, y) #横轴使用x,纵轴使用y绘图
plt.xlabel('x') #设定x轴的标签
plt.ylabel('y') #设定y轴的标签
plt.grid() #显示网格
plt.show()
这样可以画出如图2.9所示的图形。

▲图2.9 使用matplotlib绘图的例子
如果需要对细节进行进一步的调整以做出更美观的图形,则仅仅这样还是不够的。此时需要如代码段2.2所示采用能够对细节进行调整的面向对象的绘图方式。
- 代码段2.2 面向对象的绘图
fig, ax = plt.subplots() #生成Figure和Axes对象
ax.plot(x, y) #在Axes对象中生成图形
ax.set_xlabel('x')
ax.set_ylabel('y')
ax.grid()
plt.show()
可以在Figure对象中生成Axes对象,并将数据传递给Axes对象的方法(.plot())来进行绘图。可以进一步使用Axes对象的方法(.set_xlabel()等)来对图形进行调整。虽然可以像代码段2.1这样,在没有明确地生成对象的前提下描绘图形,但是如果明确生成各个对象,就可以在绘图的同时对细节进行调整。例如,可以如图2.10所示,在Figure中生成两个Axes对象。

▲图2.10 在Figure中生成两个Axes对象
可以使用代码段2.3生成图2.11。
- 代码段2.3 生成图2.11的代码
fig, ax = plt.subplots(2,1) #设置2行1列的子图形
x = np.arange(0, 4 * np.pi, 0.1)
y = np.sin(x)
z = np.cos(x)
w = y z
#生成第一个图形
ax[0].plot(x, y, ls='-', label='sin', c='k')
ax[0].plot(x, z, ls='-.', label='cos', c='k')
ax[0].set_xlabel('x')
ax[0].set_ylabel('y, z')
ax[0].set_xlim(0, 4*np.pi)
ax[0].grid()
ax[0].legend()
#生成第二个图形
ax[1].plot(x, w, color='k', marker='.')
ax[1].set_xlabel('x')
ax[1].set_ylabel('w')
ax[1].set_xlim(0, 4*np.pi)
ax[1].grid(ls=':')
fig.tight_layout()

▲图2.11 绘制面向对象型的图形
图例可以通过在绘图时使用label = 'hogehoge'添加,并在最后通过ax.legend()输出。还可以使用类似x.legend(loc = 'best')这样的语句来指定图例的位置。指定位置时可以使用表2.1中的字符串或数值。

表2.1 指定图例位置时使用的字符串和数值
线的类型可以通过linestyle = '-'或者ls = '-'来设定。符号与线型的关系如下所示。
- -:实线
- -.:点画线
- --:虚线
- ..:点线
线的粗细可以使用类似linewidth = 2或者lw = 2这样的代码来指定。线的颜色可以通过color = 'r'或者c = 'r'来指定。字符与颜色的关系如下所示。
- b:蓝
- g:绿
- r:红
- c:青
- m:品红
- y:黄
- k:黑
- w:白
记号的类型通过marker = 'o'来指定。部分记号的类型如下所示:
"." "," "o" "v" "^" "<" ">" "1" "2" "3" "4" "8"
"s" "p" "*" "h" "H" " " "x" "D" "d" "|" "_" "$x$"
实际的显示效果(按照顺序)如图2.12所示。记号的大小可以像s = 10这样设定。

▲图2.12 记号的类型
可以使用fig.savefig("hogehoge.pdf")来保存图形。
03 ScipyScipy是用于数值计算算法的扩展包,提供了信号处理、优化和统计等功能的函数,还包含了控制系统分析和设计用的函数。这里介绍用于求解微分方程的odeint。
试求下述微分方程的数值积分:

假设输入为u(t):

代码段2.4的输出结果如图2.13所示。通过def定义微分方程system,并将其与初始值y0和时间t一起传递给odeint。
- 代码段2.4 微分方程的数值积分
from scipy.integrate import odeint
import numpy as np
import matplotlib.pyplot as plt
#定义微分方程
def system(y, t):
if t < 10.0:
u = 0.0
else:
u = 1.0
dydt = (-y u)/5.0
return dydt
#通过设定初始值和时间求解微分方程
y0 = 0.5
t = np.arange(0, 40, 0.04)
y = odeint(system, y0, t)
#绘图
fig, ax = plt.subplots()
ax.plot(t, y, label='y', c='k')
ax.plot(t, 1 * (t>=10), ls='--', label='u')
ax.set_xlabel('t')
ax.set_ylabel('y, u')
ax.legend(loc='best')
ax.grid(ls=':')

▲图2.13 微分方程的数值计算
04 SympySympy是用于符号计算的模块。通过它可以把变量当作符号处理并进行各种计算。例如,可以进行表达式展开、因式分解、微分、积分甚至是拉普拉斯变换。
import sympy as sp
sp.init_printing()
s = sp.Symbol('s')
root = sp.solve(2 * s**2 5*s 3, s)
print(root)
[-3/2, -1]
在上面的例子中,我们通过Symbol将变量定义为字符,使用solve求得方程的根。如果使用init_printing(),还可以输出LaTeX格式的结果。此时不要使用print,应直接输入root。
使用expand可以进行表达式展开,使用factor可以进行因式分解。
f = sp.expand( (s 1)*(s 2)**2, s)
print(f)
s**3 5*s**2 8*s 4
g = sp.factor(f, s)
print(g)
(s 1)*(s 2)**2
除了上面介绍的功能以外还有series(泰勒展开)、apart(部分分式分解)、laplace_transform(拉普拉斯变换)、inverse_laplace_transform(逆拉普拉斯变换)等功能。
05 Python-Control本文通过实例介绍Python-Control函数。函数及其基本使用方法总结在表2.4~表2.8中,请读者在阅读过程中随时查阅。如果系统sys表示成以下形式:

那么num就表示[bm,...,b0],den就表示[an,...a0],k就表示k,z就表示[z1,...,zm,p就表示[p1,...,pn]。如果系统sys表示成以下形式:

那么A就表示A,B就表示B,C就表示C,D就表示D。
可通过下述方法加载模块。
import control
也可以使用下述方法从模块中导入类MATLAB函数。
from control.matlab import *

表2.4 模型描述
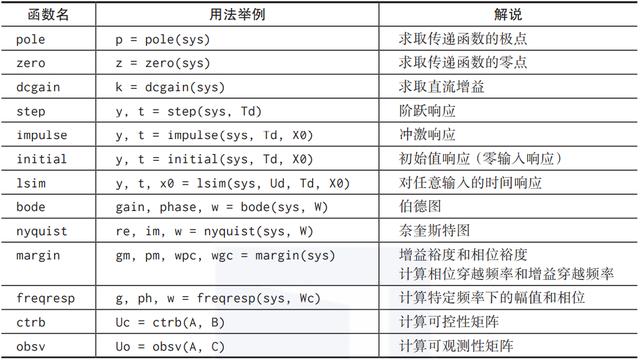
表2.5 模型分析

表2.6 控制系统设计

表2.7 模型解析(from control import cannonical_form)

表2.8 控制系统设计(from control import mixsyn)
除了上面介绍的这些函数之外还有一些其他的方便实用的函数。
比如,求取根轨迹的函数rlocus、求取平衡降阶模型的函数balred、求解李雅普诺夫方程的函数lyap、用于H2控制系统设计的函数h2syn以及用于H∞控制系统设计的函数hinfsyn等。
详细内容可以参考Python Control Systems Library:
https://python-control.readthedocs.io/en/0.8.1/index.html
关于作者:南裕树(Yuki Minami),大阪大学大学院工学研究科机械工学专业教授,京都大学大学院情报学研究科博士。主要研究领域包含制造技术、系统工程、深度学习等。
本文摘编自《用Python轻松设计控制系统》,经出版方授权发布。(ISBN:9787111688112)

《用Python轻松设计控制系统》
推荐语:面向用Python进行控制系统设计的人,边学边用Python进行编程实践。重点阐述以状态空间模型为对象的现代控制系统的设计。全书分七章,包括: Pythhon环境的构建、数据和流控制、反馈控制、状态空间模型、闭环系统的控制设计、开环系统的控制设计、PID控制相位进延迟补偿,以及稳健性控制数字实现的高级控制系统设计。
,免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。文章投诉邮箱:anhduc.ph@yahoo.com