acc自适应巡航弊端(ACC自适应巡航不能识别静止车辆是设计缺陷)
ACC自适应巡航不能识别静止车辆是设计缺陷?究竟还能不能使用?
阅读一些车辆使用说明书或者车辆使用手册,通常会发现上面都会对ACC功能专门提到:ACC系统可能对“静止车辆”无效等类似的表述。其实这并不是设计缺陷,而是为了提高识别的准确率,反而是为了进一步提升舒适性和安全性。
ACC和AEB两者相辅相成,接下来咱们就来聊聊ACC和AEB对于静止目标的识别差异,主要来聊聊他们的感知机构。

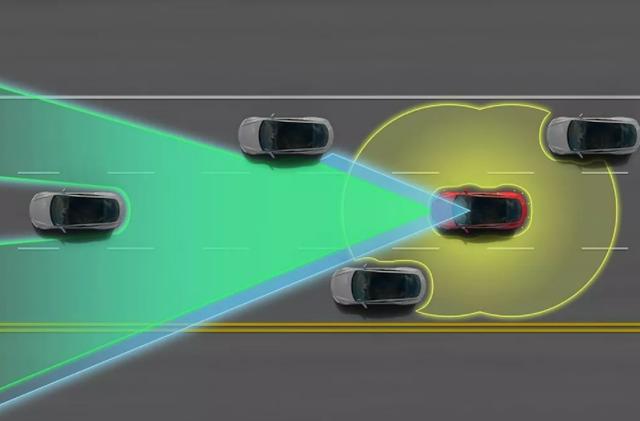
ACC和AEB 的感知机构,目前主流供应商对于提高对静止目标识别的方法是将毫米波雷达与前置摄像头进行融合控制,前置摄像头作为传感器将识别的目标传送到雷达的控制器ECU,通过优化融合算法提升对静止目标的识别能力。比如目前特斯拉就是通过这个方案把ACC开启的状态下的防追尾能力提升到120km/h。
毫米波雷达的原理是发射毫米波段的电磁波,利用障碍物反射波的时间差确定障碍物距离,利用反射波的频率偏移确定相对速度,这也是毫米波雷达的主要功用。
毫米波雷达对静止物体的局限性是由于一些工况下对雷达信号的处理要滤除静止物体的特征,比如为防止对电线杆等可以反射雷达波的物体产生制动作用,ACC功能对于这样的静止目标一般不识别。这样的算法被称为静态杂波滤除,比较专业的说法是指把多普勒速度为0的信号去除,这样的话所有速度为0和细微运动的目标将会被抑制,会提高识别的准确程度。
而从功能上讲。ACC的作用是根据前车情况自动控制车距和车速,进而减少驾驶者对油门和刹车的操作,目的是提高舒适性。就像ACC请求的制动减速度都有限制,一般的极限是在-4g。还是用刚才的“电线杆”举例,估计没人想使用ACC时,系统时常来一脚刹车吧;而AEB是属于安全性功能,主要是通过检测前方障碍物,判断是否进入了危险状态,可以为驾驶员提供危险信号输入,如果驾驶员的反应时间不能够确保危险解除的话,那么汽车的刹车制动系统就会自行介入,从而实现刹车制动,避免交通事故的发生。所以AEB对于静止目标的识别要求很高,总不能每遇到一根电线杆,就进行一次紧急制动吧。所以为避免误触发,只有当识别概率达到触发条件才会对静止目标起作用。

随着汽车行业毫米波雷达技术的进步,技术壁垒被打破,汽车的传感器也会升级演化。ADAS系统设计者会通过探索使用毫米波雷达来建立精准的整车周边环境的模型,进而提升场景感知。另外成像雷达的到来会加速这个趋势,成像雷达可以提升角分辨率以及物体区分能力,进一步提供更精确的区分场景的能力;如此车辆ECU对外部物体的识别准确度提升大有益处,这也是雷达对于ADAS自动驾驶一个很重要的输入参数。当然,这些技术和硬件的进步也会使毫米波雷达在车辆上的搭载度更广泛,数量也会大大提升。
,免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。文章投诉邮箱:anhduc.ph@yahoo.com






