四轮独立转向汽车(基于向量运算的四轮独立转向车辆)
王 勇安徽合力股份有限公司 合肥 230601
摘 要:采用向量运算方法建立平面运动车辆车轮转角计算数学模型,推导出基于向量运算的四轮独立转向车辆转角计算方法。通过计算程序对四轮转向车辆的转角变化进行了仿真计算,验证了利用所述方法求解四轮独立转向车辆转角的正确性。该方法同样适用平面运动的多轮独立转向车辆转角计算,为独立转向的平面运动车辆转角计算提供了算法参考。
关键词:车辆;独立转向;转角;向量;计算
中图分类号:U462 文献标识码:A 文章编号:1001-0785(2018)05-0113-03
0 引言平面运动车辆转向的实质是车辆绕运动平面上任意一点作圆周运动,该点称为车辆的速度瞬心点。车辆转向就是改变车辆速度瞬心的远近位置,从而改变车辆的转弯半径。两轮转向车辆一般采用车身前方左、右轮进行转向,或采用车辆后方左、右轮进行转向,见图1。对于两轮转向车辆,车辆在转向时,其速度瞬心点通常位于车辆的后桥(或前桥)轴线上,见图1 中的P 点。
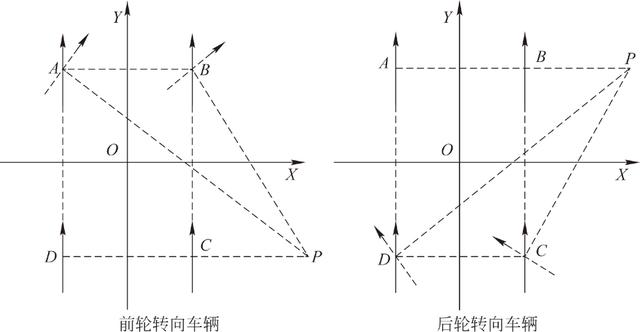
图1 前轮、后轮转向车辆
在某些场合下,人们希望车辆四个车轮(或多个车轮)都能实现转向,以获得最大机动性能,满足特定作业场合下车辆机动性、灵活性和通过性等指标要求。如具有全向行驶功能的物料搬运叉车,其具有原地转向、平移和四轮独立转向功能(见图2)。对于四轮(或多轮)独立转向车辆,车辆转向过程中的速度瞬心点理论上可以是车辆运动平面内任意一点。
本文借助垂直于车辆运动平面的单位向量

1 独立转向车辆的转角计算模型对于独立转向车辆,为了获得车辆良好的操控性能,一般设定速度瞬心沿车辆某条已知的轴线移动(如车辆前、后桥轴线的对称线)。车辆的局部坐标系原点可以是车辆运动平面内的任意位置。为不失讨论的一般性和方便问题讨论,本文假定车辆速度瞬心位于过车辆局部坐标系原点的任意轴线上。假定车辆的局部坐标系X 轴与车辆前、后桥对称轴线重合,Y 轴与车辆左、右对称轴线重合,如图3 所示。图中A、B、C、D 为车轮垂直于运动平面的旋转点,O 为车辆局部坐标系原点,轴线OP 为车辆速度瞬心所在轴线,β 为OP 轴线与X 轴正向夹角0 ≤β ≤π ,当β =0 时,OP 与X 轴重合。向量、、、为车轮运动方向向量,向量为垂直于车辆运动平面的单位向量。向量的方向按右手直角坐标系确定。当车辆顺时针旋转时,向量指向Z 轴负方向,反之,向量指向Z 轴正方向。图3 中,一旦车辆局部坐标系确定,向量、、、作为为车辆的固有几何结构也将唯一确定。

图2 四轮独立转向车辆
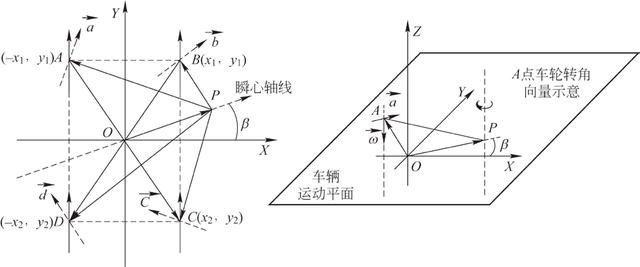
图3 独立转向车辆的转角计算模型
2 独立转向车轮的转角计算对于独立转向的车辆,车辆转弯时,可等效为实时控制转角,使车轮的旋转轴线实时相交于平面上任意点P ,从而保证车辆在平面上作纯滚动。实时控制车轮转角的前提是必须实时解算转向过程中车轮的转角。由平面几何知识知,平面内任意确定点的位置需要两个独立参数决定。因此,对于四轮独立转向车辆,要使车辆在平面内作不同半径下的纯滚动,需要车辆转向装置输入两个随时间变化的独立参数。两轮转向车辆本质上也需要两个独立参数才能确定车辆的瞬心位置,但由于两个转向车轮通过机械结构左右建立了关联,车辆的速度瞬心被转向机构锁定在前(或后)桥轴线上,因此,实际上只需要一个输入量(如方向盘转动角)就可以唯一确定车辆的速度瞬心。
对于四轮独立转向车辆,假定通过车辆的转向装置确定了OP 轴线与X 轴正向夹角β (0 ≤β ≤π ) 和P 点距坐标原点O 的距离,即向量已知,则独立转向车轮的转角可借助垂直于运动平面的单位向量由以下算式计算得到
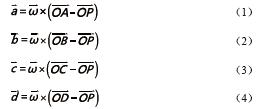

由已知条件和向量叉积运算得到车轮的方向向量

需特别指出,垂直于X-Y 平面的单位向量的方向约定如下:1)方向盘在中位时,车辆四轮与Y 轴平行,车辆挂前进挡,车辆向前行驶,则向量

2)在1)条件下,当车辆方向盘由中位向左转,车轮向左偏转,车辆的瞬心P 从Y 轴负向所在的下半平面上无穷远处向坐标原点O 靠近时(瞬心P 至多与O 重合,不穿越O 点),向量为;反之,向量为- 。
3)在1)条件下,当车辆需要进行任意角度平行移动时,车辆瞬心位于轴线OP 的无穷远处,向量的方向与1)约定状态相同。方向盘中位时,车辆四轮与Y 轴平行,方向盘向左转动时,车轮同时以相等角度向左偏转;反之,向右偏转,车辆转角变化范围与β 相等(0 ≤β ≤π )。
特别指出,在工程实际应用中, 为车辆角速度,不一定是单位向量,本文仅研究独立转向车轮的转角,因此,将设为单位向量,如果为车辆角速度实际值时,按本文方法计算出的

3 算法验证对某四轮转向车辆转向过程中转角变化进行了模拟计算。车辆局部坐标系原点O 距前轮轴线为y 1,距后轮轴线为y 2。

4 结论对于四轮独立转向平面运动车辆,引入垂直于运动平面的向量


图4 车辆瞬心沿轴线变化时的转角变化
参考文献[1] 舒进. 四轮转向车辆运动仿真分析[J]. 汽车科技,2002,6(6):6-8.[2] 王建胜. 四轮转向汽车运动规律分析[J]. 西部探矿工程,2005, 114(10):133,134.[3] 汪东明. 四轮转向汽车的转向特性及控制技术[J]. 现代机械,2003,6(6):73-75.
,免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。文章投诉邮箱:anhduc.ph@yahoo.com






