智能机器人产业发展前景(机器人行业报告)
报告出品方:国金证券
以下为报告原文节选
------
一、机器人的力控都有哪些方式?
1.1 力觉属于机器人感知系统的重要组成部分之一
机器人感知层是凭借感知技术通过获取和分析力觉、触觉、视觉、位置等信息,实现对于外部环境和状态的理解,为人机的智能交互和柔性作业提供决策依据,是目前机器人实现智能自主操作的关键技术。在众多的感知方式中,力触觉感知系统能检测机器人末端执行器操作工件时所产生的三维力/力矩、接触信息,为机器人提供力觉感知环境,是系统完成操作作业的重要条件之一。
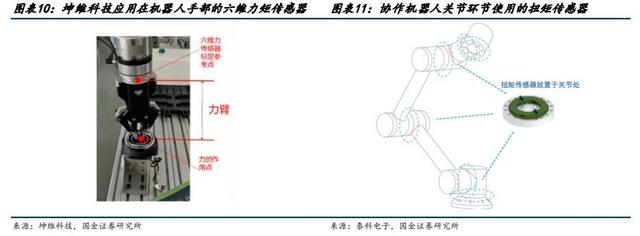
力觉传感器主要布置在手腕、关节等多部位。区别于垂直单方向压觉力感知,机器人力觉感知是指机器人作业过程中对来自外界大部分力的感知,是机器人主动柔顺控制必不可少的环节,它直接影响着机器人的力控制性能,分布在机器人的腕部、躯干关节、脚部、手指等部位。

1.2 力控是机器人实现柔顺控制的前提
机器人的运动控制可以分为位置控制、速度控制、力控。工业界传统的机器人都使用位置控制,在位置控制下,工业机器人会严格按照预先设定好的位置轨迹进行活动,但是,若机器人的运动过程中受到了障碍物的阻拦,会导致机器人位置追踪误差变大,这种情况下机器人会“出力”追踪预设的运动轨迹,导致机器人与障碍物之间产生巨大的内力,无法完成柔顺控制。

相比位置控制,力控对于机器人的柔顺控制更加重要。现在常用的机器人位置控制可以使机器人在与环境无相互作用力或相互作用力可忽略不计时完成任务,如喷涂、焊接等。然而在如抛光或打磨等应用场景中,仅使用位置控制将不能满足任务需求。这时需要引入末端执行器将力/力矩作为反馈量进行控制,智能调整运动轨迹,实现机器人的柔顺控制。
比如:
1)工业机器人:在工业机械臂表面抛光的场景下,表面处于不规则的状态,需要严格地控制末端抛光件与表面接触力的大小,因此需要不断获得末端执行器的力反馈,进行动态力反馈控制。
2)人形机器人:波士顿动力的 Atlas 在不规则的雪地路面上行走时,路面情况无法通过提前建模预测,这种情况下,如果通过位置控制,无法规划出一条合理的位置轨迹,必须引入力控,才能实现动态控制。

1.3 机器人的柔顺力控有哪些方案?
柔顺控制指机器人与环境进行物理交互时,通过采取一些新的柔顺元件,或者设计新的控制策略使得机器人具有柔顺性,采用相关柔性辅助元件使机器人展现柔顺特性的方式通常被称为被动柔顺,而通过设计相关柔顺控制策略作用于机器人使机器人展现柔顺特性的方式通常被称为主动柔顺。
根据南京航空航天大学段晋军博士的分析来看,机器臂柔顺控制方式分为被动柔顺控制和主动柔顺控制,主动柔顺控制又分为直接力控、间接力控、混合位置/力控。

1.3.1 被动柔顺控制:机械臂的被动柔顺控制是在机械臂的末端安装一个机械弹性结构(弹簧、阻尼),通过机械臂的弹性来实现力控的功能。这类力控方式工艺简单、成本低廉、对于机械臂无特殊要求,但是力控精度无法保证,机械臂拥有复杂的结构,有非线性的摩擦力、传动间隙,导致期望刚度无法精确获得,适用于对于力控精度要求较低的场景。

1.3.2 主动柔顺控制:主动柔顺控制需要机器人获取对力信息和位置信息的反馈,利用力与位置的反馈信息结合相应算法去主动控制机器人运动或者作用力,分为直接力控和间接力控、混合位置/力控。
间接力控:间接力控不是单纯的控制力或者控制位置,而是控制力与位置的相对关系,使得与机械臂的末端弹性结构通过软件算法来实现力控。间接力控根据控制原理的不同又分为导纳控制和阻抗控制。
1)导纳:导纳控制广泛应用于实现机器人的主动柔顺从而完成拖动示教,其主要原因是导纳控制器能够建立环境与机器人之间的动态关系,利用虚拟刚度、阻尼、惯性参数创建从力到运动的映射。通过调节上述三种参数,改变机器人柔顺特性,使机器人服从人类施加的力并做出相应的运动。
2)阻抗:阻抗控制是将控制器等效为阻抗系统,输入位置输出力。是由 Hogan 于 1985年提出的主动柔顺控制策略,是目前柔顺控制使用较多的方法之一。阻抗控制本质为建立机器人在与环境交互过程中所受外界环境交互力与机器人姿态之间的映射关系,从而实现根据外界交互力调节机器人姿态的功能,进而实现机器人的主动柔顺。

直接力控:相比于间接力控,直接力控更适合于不考虑人机交互安全性的场景,比如打磨场景,需要精确的力输出在某个表面。这种力控方式主要包括电流环、基于一维力传感器、基于六维力传感器、基于关节扭矩传感器这几种方式。
1)电流环:电机以恒定的电流运转,以产生恒定的加速力矩,这类力控无需额外的传感器,但是力矩精度差。
2)基于一维力传感器:在机械臂的末端加装一维力传感器感知外力,仅适用于的控制一个方向的力,相对更好的控制精度。
3)基于六维力矩传感器:精度远高于一维力传感器。
4)关节扭矩传感器:主要应用于机械臂的关节处,精度介于电流环和力传感器之间。
混合位置/力控:通过位置反馈回路对力反馈回路进行调节进而控制末端执行器与环境的交互力,并将该算法应用于磨抛任务当中。
1.4 历史上不同力控方案的机器人都有哪些案例?
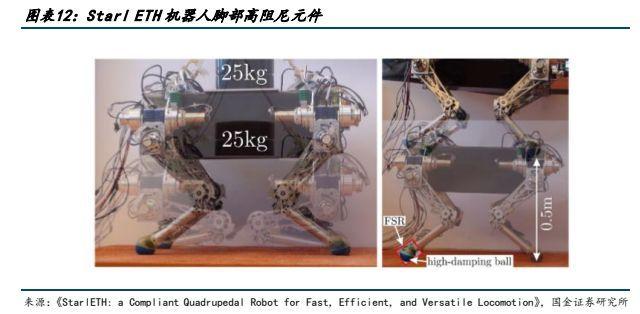
被动柔顺控制案例:Starl ETH 机器人被动柔顺控制指的是在力觉控制的末端执行器环节安装一个机械弹性结构(弹簧、阻尼),进而实现力控,Starl ETH 机器人属于这类力控方式,根据 StarlETH 机器人的相关论文表明,Starl ETH 内部的核心元件是高柔顺性系列弹性制动器,这种设计实现了扭矩的可控性,并且能够对接头角度、电机角度、弹簧的偏转实现精准测量。
Starl ETH 机器人的关键元件为轻质高阻尼球型脚,通过内部的力敏电阻器感受力的变化,前端的传感器还包括 IMU 感受角速度和加速度来控制运动。
主动柔顺控制之阻抗案例:优必选、HYQ
1)优必选:优必选仿生机器人通过提取关节力矩或电流计算机器人末端受到的一个六维力和力矩,通过阻抗控制即可实现机器人的柔顺效果。

2)HYQ:为了实现机器人与外界环境进行交互,需要控制机器人的阻抗(接触点的运动和接触点力之间的关系),HYQ 机器人通过控制阻抗实现了对于机器人的腿部控制。

六维力矩传感器在机器人实现力控六维力矩传感器可广泛应用在科研、实验室、工业机器人领域,机器人通过六维力和力矩传感器感受末端力反馈可实现整体控制,这类力控是目前较为普遍实现力反馈的路径。

电流环实现力控案例:ABB 的双臂机器人 YuMi ABB 的双臂机器人轻质合金手臂均具有 7 轴自由度,能模拟人类肢体动作,在大幅提升空间利用率的同时,又能契合消费电子行业灵活敏捷的生产需求。ABB 力控方式并没有使用力传感器,而是采用电流环的方式,所用的电机、减速机相对较小,产生的摩擦力也小,因此动力学辨识相对更准一些。但是由于没有力传感器,也就无法实现精准力控。

力/位置混合控制:IGrinder 智能力控打磨解决方案20 年宇立仪器和江苏金恒联合开发出了智能力控打磨方案,该方案为典型的力/位混合控制案例,该方案集成了恒力控制和位置浮动功能,内置力传感器、位移传感器、倾角传感器和电气伺服控制系统,实时感知打磨力、浮动位置和磨头姿态等信息,能够自动补偿机器人姿态、轨迹偏差和磨料磨损,保证恒定的打磨压力,从而获得打磨效果的一致性。

总结:根据上述各类机器人力控方式来看,主动柔顺控制已经成为未来机器人与外界交互必经之路,以优必选的仿生机器人为例,该产品通过阻抗控制实现了抗性、柔顺性,在受到外力的情况下,仍然能够完成操作。而从目前主流柔顺力控方式来看,多数的均需要使用力传感器收集力反馈的信号,力/力矩传感器为各类机器人实现柔顺控制的核心部件,因此下文我们将重点分析力/力矩传感器的各个种类、成本、格局。
二、机器人的力传感器的种类有哪些?
2.1 从检测原理来看,电阻应变式传感器综合性能更优
从检测方法来看,力传感器可分为电阻式、电容式、电感式,光电式等。电阻应变式、电容式两类检测模式优势明显,有望在人形机器人中得到应用。

--- 报告摘录结束 更多内容请阅读报告原文 ---
报告合集专题一览 X 由【报告派】定期整理更新
(特别说明:本文来源于公开资料,摘录内容仅供参考,不构成任何投资建议,如需使用请参阅报告原文。)
精选报告来源:报告派
科技 / 电子 / 半导体 /
人工智能 | Ai产业 | Ai芯片 | 智能家居 | 智能音箱 | 智能语音 | 智能家电 | 智能照明 | 智能马桶 | 智能终端 | 智能门锁 | 智能手机 | 可穿戴设备 |半导体 | 芯片产业 | 第三代半导体 | 蓝牙 | 晶圆 | 功率半导体 | 5G | GA射频 | IGBT | SIC GA | SIC GAN | 分立器件 | 化合物 | 晶圆 | 封装封测 | 显示器 | LED | OLED | LED封装 | LED芯片 | LED照明 | 柔性折叠屏 | 电子元器件 | 光电子 | 消费电子 | 电子FPC | 电路板 | 集成电路 | 元宇宙 | 区块链 | NFT数字藏品 | 虚拟货币 | 比特币 | 数字货币 | 资产管理 | 保险行业 | 保险科技 | 财产保险 | 机器人
,免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。文章投诉邮箱:anhduc.ph@yahoo.com