西门子s7-200smart运动控制面板(西门子200SMART-运动控制-运动控制-回原点)
哈喽,大家晚上好呀~
今天给大家带来西门子200SMART-运动控制-运动控制-回原点。
好啦,下面是内容啦!
1、在运动控制向导中使能寻找参考点

图1
注意:
若用户的应用需要从一个绝对位置处开始运动或以绝对位置作为参考,就必须建立一个参考点(RP)或零点位置,该点将位置测量固定到物理系统的一个已知点上。
2、设置寻找参考点位置参数
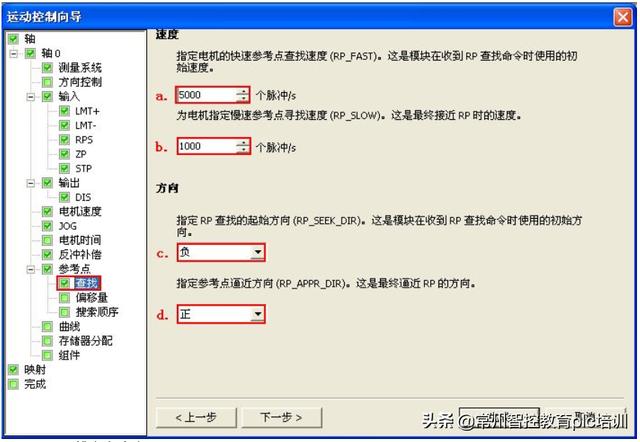
图2
a.定义快速寻找速度“RP_FAST”(快速寻找速度是模块执行RP寻找命令的初始速度,通常RP_FAST是MAX_SPEED的2/3左右);
b.定义慢速寻找速度“RP_SLOW”(慢速寻找速度是接近RP的最终速度,通常使用一个较慢的速度去接近RP以免错过,RP_SLOW的典型值为SS_SPEED);
c.定义初始寻找方向“RP_SEEK_DIR”(初始寻找方向是RP寻找操作的初始方向。通常,这个方向是从工作区到RP附近。限位开关在确定RP的寻找区域时扮演重要角色。当执行RP寻找操作时,遇到限位开关会引起方向反转,使寻找能够继续下去,默认方向=反向);
d.定义最终参考点接近方向“RP_APPR_DIR”,(最终参考点接近方向是为了减小反冲和提供更高的精度,应该按照从RP移动到工作区所使用的方向来接近参考点,默认方向=正向)。
3、设置参考点偏移量

图3
注意:
参考点偏移量“RP_OFFSET是”在物理的测量系统中RP到零位置之间的距离,缺省=0。
4、设置寻找参考点顺序

图4
S7-200SMART 提供4中寻找参考点顺序模式,每种模式定义如下:RP寻找模式1:将RP定位在靠近工作区一侧的RPS输入开始激活的位置;RP寻找模式2:将RP定位在RPS输入的激活区域的中心;RP寻找模式3:将RP定位在RPS输入的激活区域外的指定数量的零脉冲(ZP)处;RP寻找模式4:将RP定位在RPS输入的激活区域内的指定数量的零脉冲(ZP)处。注意:必须使能 RPS输入才能使用RP搜索功能。若要使用 RP搜索模式3或模式4,则还必须使能ZP输入,除非在进入RPS有效区后将要接收的ZP脉冲的数量组态为“0”。

图5RP搜索模式1

图6RP搜索模式2

图7RP搜索模式3

图8RP搜索模式4
5、调用回原点指令

图9
,免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。文章投诉邮箱:anhduc.ph@yahoo.com






